
Beobachtungen:
Bewegte Materie, oszillierend
Bewegt sich reale (sichtbare) Materie, dann folgt die sie umgebende feinstoffliche Materie der Bewegung.
Durch die Wechselwirkung mit der übrigen (ruhenden) feinstofflichen Materie entstehen Strukturen (Wirbel usw.) deren Spuren von sensitiven Personen wahrgenommen werden können.
Meist sind es Edelgase in der Luft, die als Vermittler zwischen feinstofflicher und normaler Materie wirken.
Anschaulich lassen sich solche Vorgänge mit Hilfe von Bewegungen eines Objektes auf einer zweidimensionalen Wasseroberfläche nachstellen.
Dort hinterlassen selbst kleinste Bewegungen große Strukturen.
0. Strukturen, Bewegung und Beschleunigung
1. Periodische Hin- und Herbewegung über einen Kurbelantrieb
2. Batterie, Magnet und Wismut
3. Oszillierende Drehbewegung einer Pertinax-Scheibe
4. Auswertung 2018
5. 23.06.2018, Experimente mit verbesserter Bewegungseinrichtung (nahezu ruckfrei)
6. Orbital und Resonanzlinien bei periodischer Bewegung des Objektes
7. PsiTrack zu einem oszillierendem Objekt
8. Fortsetzung der Versuche Mai, Juni 2019
8.1 Verbesserter Aufbau
8.2 Unterschiedliche Probekörper auf dem Verfahrtisch, Ziehrichtung,
Wachstumsrichtung, Form und Orientierung
8.3 Orientierung von Zylindern, Quadern und konischer Körper, Wismut
8.4 Einfluß von einer Helmholtz-Spule
9. Modifikation des Aufbaus
9.1 Weitere Antriebe, Teil einer sinusförmigen Bewegung
9.2 Bewegung in unterschiedlichen Himmelsrichtungen
9.3 Antrieb mit Schrittmotor und Linearführung
10. Einfluß der Beschleunigung
10.1 Zum Vergleich: Beschleunigtes Objekt auf einer Wasseroberfläche
10.2 Messung der Beschleunigung beim Linearantrieb
10.3 Kantenstrahlung
10.4 Anregung von konischen Körpern und von Sonnenlicht, Beugung am Gitter
10.5 Batterien und Streifengitter
10.6 Gespiegeltes Sonnenlicht
11 Auswertung bis Juni 2019
Fortsetzung
12. bewegte-materie-oszillierend-zwei.htm
rotierende Objekte
13. Bewegte Materie auf Fahrzeug, Bugwelle
1. Vorversuche 2016, Matchbox-Autos
2. Aufbau mit Zahnriemen, Getriebemotor sowie Scheibenwischermotor
3. Beobachtete Strukturen
4. Die Objekte, Zylinder, Quader aus Metalle
5. Nachtrag 2018, Eisenzylinder fährt
6. Nachtrag 2025, Holzwagen fährt mit unterschiedlichen Materialien
Fortsetzung in bewegte-materie-oszillierend-zwei.htm
Kurzfassung in bewegte-materie-oszillierend-kurz.htm
aktive-elemente.htm
beschleunigte-ladungen.htm
0. Strukturen, Bewegung und Beschleunigung
 |
| Abb. 00-01: Ein Wasserläufer bewegt
sich nach rechts, ein weiterer ist rechts oberhalb
davon am Bildrand. (FB) |
 |
| Abb. 00-02: Bugwellen von zwei Enten
(FB) |
 |
| Abb. 00:03: Große Heckwellen mit
langer Reichweite und großer Lebensdauer hinter
einer Fähre auf der glatten Ostsee. Selbst wenn das
Schiff schon vor langer Zeit den Hintergrund
verlassen hat, zeigen die Wellen dort noch ein Bild
aus der Vergangheit. (FB) |
 |
| Abb. 00-04: Eine Ente bewegt
periodisch ihren Schnabel auf und ab. Dabei
entstehen Kreiswellen (FB) |
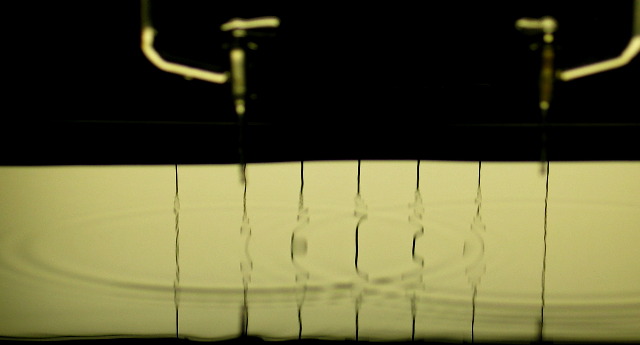 |
Abb. 00-04a: von zwei Stellen fallen
Tropfen ins Wasser, aus wasser-ader-drei-02.htm#kapitel-09 |
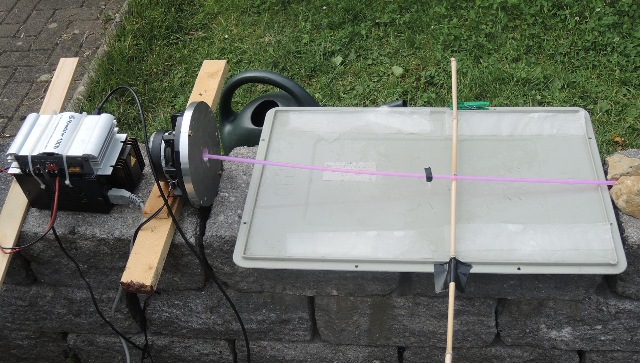 |
| Abb. 00-05: An
einer Lautsprechermembran ist ein Strohhalm
befestigt. Dieser bewegt sich periodisch hin und
her, wenn die Membrane von der Kombination aus
Frequenzgenerator und Verstärker zum Schwingen
angeregt wird. In der flachen Wanne befindet sich
Wasser. Bei der Mitte des Halmes ist ein kleiner
Haken angebracht, der ein kleines Stück in die
Wasseroberfläche hineinreicht. (FB) |
 |
| Abb. 00-06: Schaltet
man die Anregung ein, dann entstehen bei der Hin-
und Herbewegung stehende Wellen. In dem hellgrün
markierten Bereich findet man radiale Streifen. (FB) |
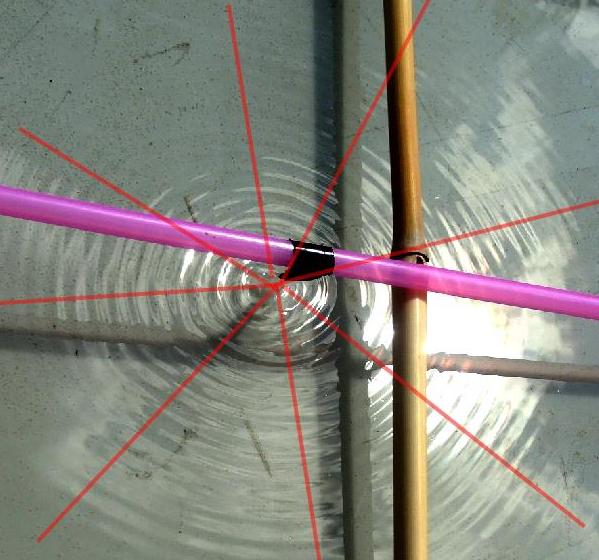 |
| Abb. 00-06a: radiale Streifen (FB) |
 |
| Abb. 00-06b: grüne Quader:
unterschiedliche Bewegungbereiche des Anregers (FB) |
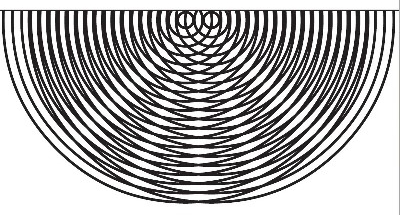 |
Abb. 00-07: Dieses Bild findet man
bei Wasseroberflächen, wenn man zwei Tupfer
periodisch auf die Wasseroberfläche drückt. Die
Eintauchstellen sind jeweils im Mittelpunkt der
beiden kleinen Ringe.aus ueberlagerung.htm |
 |
| Abb. 00-08: Beim Beschleunigen oder
Abbremsen wirken Kräfte. Ungenügend befestigte
Ladung kann sich dabei vom Fahrzeug trennen. (FB) |
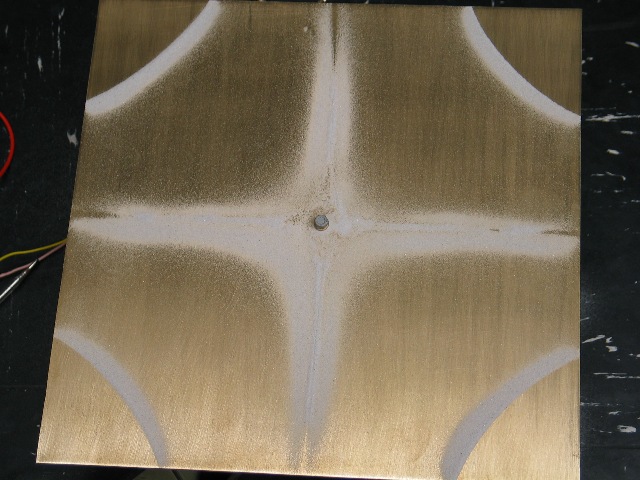 |
| Abb. 00:09: Chladnische Klangfiguren,
diese Messingplatte war zunächst gleichförmig mit
Sand belegt. Anschließend wurde sie eine
Eigenschwingung versetzt. Da der Sand lose auf der
Platte lag, konnte er den Schwingungen der Platte
nur teilweise folgen. Bei der Aufwärtsbewegung wurde
er mitgenommen, bei der Abwärtsbewegung aber nicht.
Als Ergebnis ist dieses Muster entstanden, daß die Ruhezonen
während der Schwingung markiert. stehende-welle.htm
(FB) |
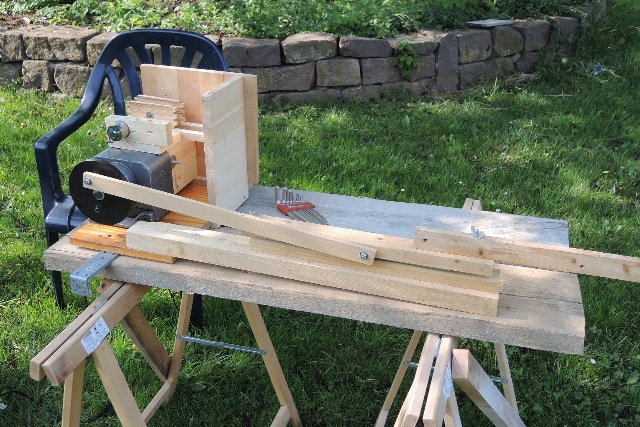
1. Periodische Hin- und Herbewegung über einen Kurbelantrieb
Der Aufbau ist sehr primitiv. Es gibt Spiel in den Führungen, so daß die Richtungswechsel nicht ruckfrei sind.
Dabei konnen kurzzeitig höhere Beschleunigungen auftreten
 |
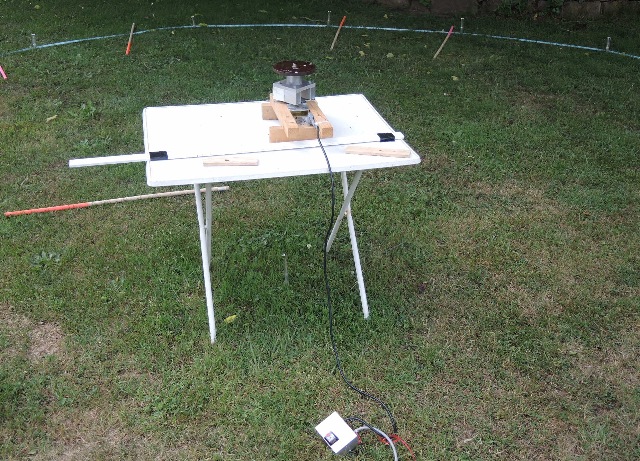
| Abb. 01-01: Oszillierender Antrieb,
Gleichstrommotor (für 12 Volt im Auto) und Kurbel Umdrehungen/Minute bei 2,4 Volt: 1,2; 4,84 Volt: 5,6 ; 7 Volt: 10; 12,7: 24 (FB) |
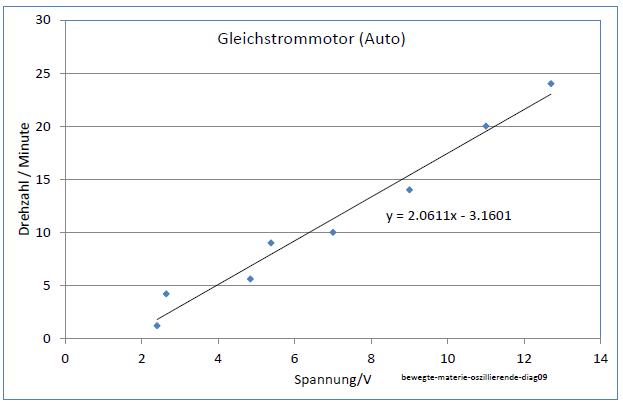 |
| Abb. 01-02: Kennlinie des Motors,
Abhängigkeit der Drehzahl von der Spannung (FB) |
 |
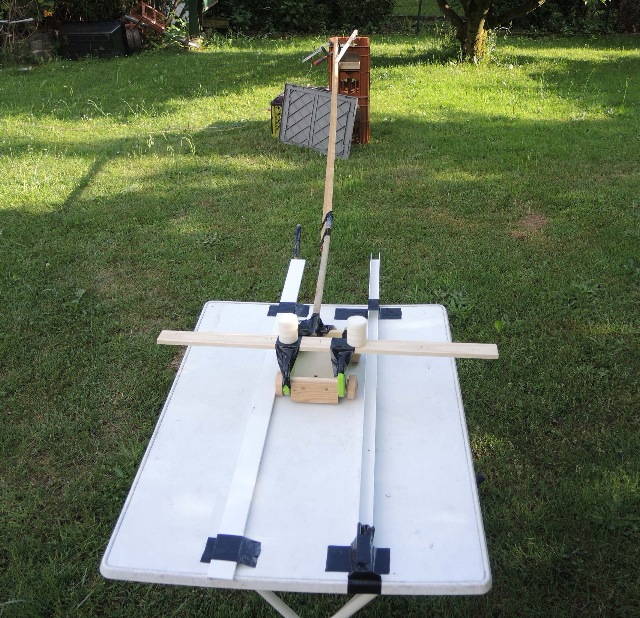
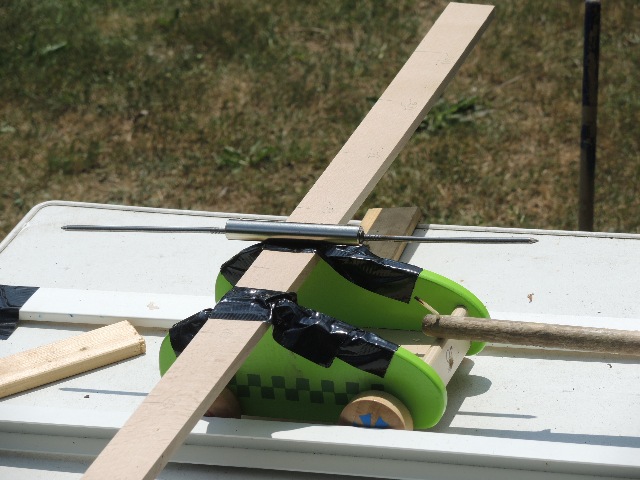
| Abb. 01-03: Kleiner Wagen aus Holz
mit Querträger aus Holz zur Aufnahme von
Probekörpern, Kabelkanäle sorgen für die seitliche
Führung. Der Antrieb erfolgt über die runde Stange
(unten im Bild). (FB) |
 |
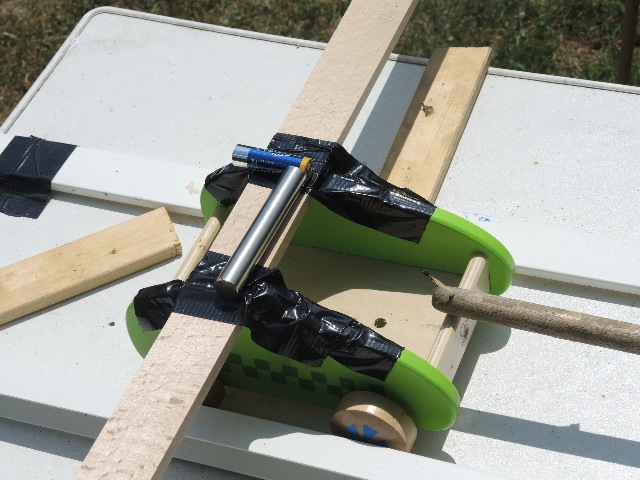
| Abb. 01-04: Fahrzeug und
Antriebseinheit: Zwei Sätze mit 4 Teelichtern. (FB) |
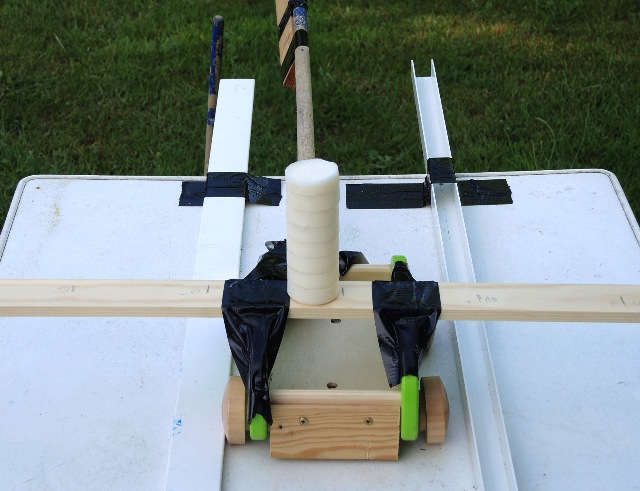 |
| Abb. 01-05: Ein Satz mit 8
Teelichtern. (FB) |
 |
| Abb. 01-06: Ein Satz mit 8 Teelichtern. Im Hintergrund sind am Meßkreis mit Radius 4 m die spürbaren Strukturen ausgelegt. (FB) |
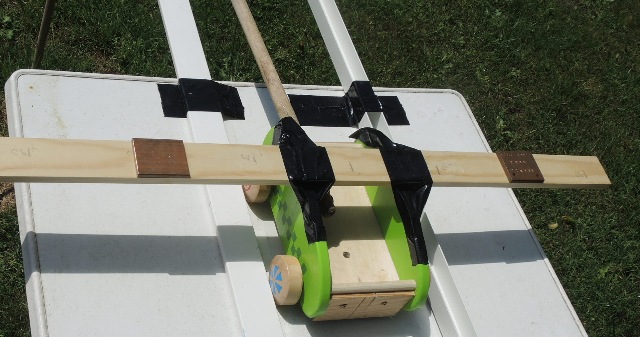 |
| Abb. 01-07: Zwei Kupferstücke, je
etwa 80 g schwer (FB) |
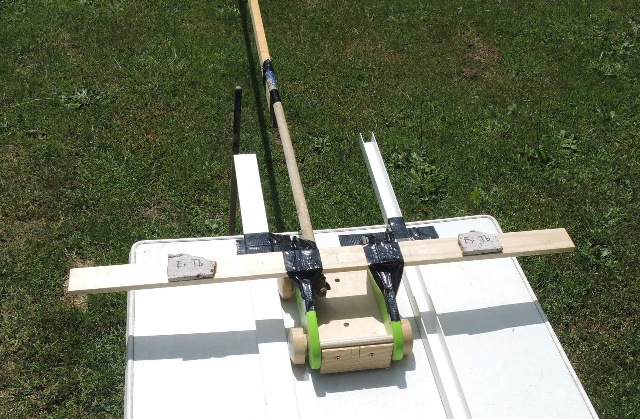 |
| Abb. 01-08: Zwei Steine aus der
Fränkischen Schweiz. (FB) |
 |
| Abb. 01-09: Stabmagnet aus Neodym
(FB) |
 |
| Abb. 01-10: Mit Wismut kann man durch
"Abreiben" die spürbaren Strukturen um einen
Stabmagneten entfernen. wismut.htm
(FB) |
 |
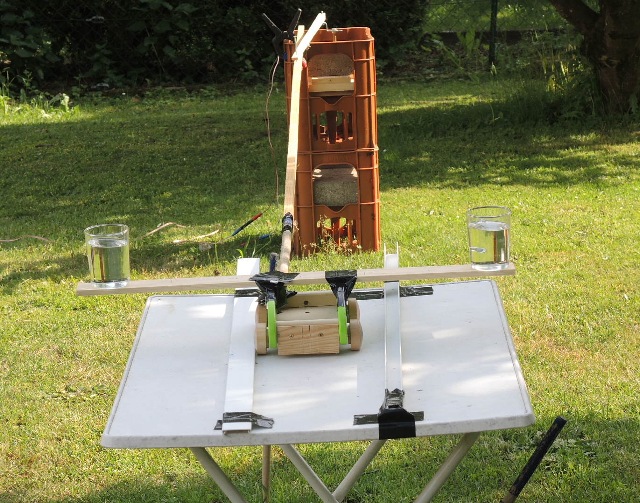
| Abb. 01-11: Zwei Wassergläser im
Abstand von 60 cm. (FB) |
 |
| Abb. 01-12: 27.5.2018 Zwei
Wassergläser (FB) |
 |
| Abb. 01-13: 27.5.2018 zwei
Wassergläser und die dazugehörigen Strukturen bei
unterschiedlichen Parametern: Drehzahl, bzw.
Abstand (FB) |
 |
| Abb. 01-14: Übersicht,
Winkelmarkierungen am Meßkreis. (FB) |
 |
| Abb. 01-14a:Zwei Wassergläser auf dem
Holzbrett (FB |
 |
| Abb. 01-15: Hohlkörper aus Kupfer,
Achse vertikal (FB) |
 |
| Abb. 01-16: Hohlköper aus Kupfer,
Achse horizontal (FB) |
2. Batterie, Magnet und Wismut
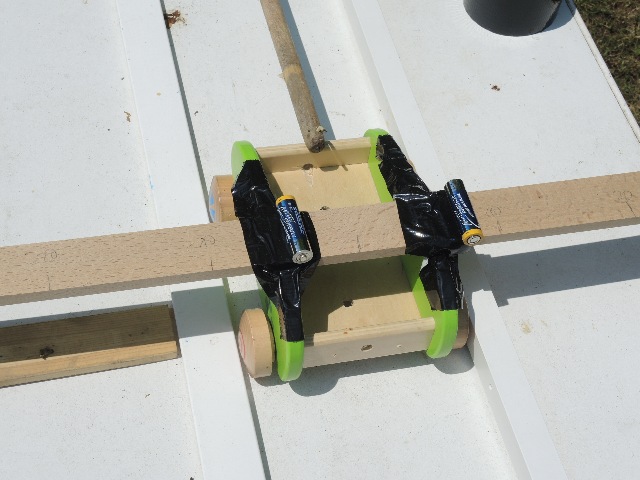 |
| 02-01: Zwei Baterien (AA-Zellen)
antiparallel (FB) |
 |
| Abb. 02-02: Mit Wismut lassen sich
die spürbaren Strukturen der Batterien reduzieren. wismut.htm
(FB) |
 |
| Abb. 02-03: Stabmagnet, Achse
horizontal Bei periodischer Bewegung füllt sich nach kurzer Zeit der ganze Garten mit Strukturen. Sie wachsen ständig an. Reibt man den Magneten vorher mit Wismut ab, dann wachsen die Strukturen nur sehr langsam, sie sind fast nicht vorhanden. (FB) |
 |
| Abb. 02-04: Stabmagnet mit zwei
Nägeln aus Eisen (FB) |
 |
| Abb. 02-05: Kombination aus Batterie
und Stabmagnet, in gleicher Achsenrichtung (FB) |
 |
| Abb. 02-06: Kombination aus Batterie
und Stabmagnet, Achsen zueinander senkrecht. (FB) |
 |
| Abb. 02-07: Mit Wismut lassen sich
die Strukturen reduzieren. wismut.htm (FB) |
 |
| Abb. 02-08: Stabmagnet in dem
Hohlkörper aus Kupfer, 27.5.2018 (FB) |
 |
| Abb. 02-09: Der Dipol wird mit dem
Fahrzeug bewegt. (FB) |
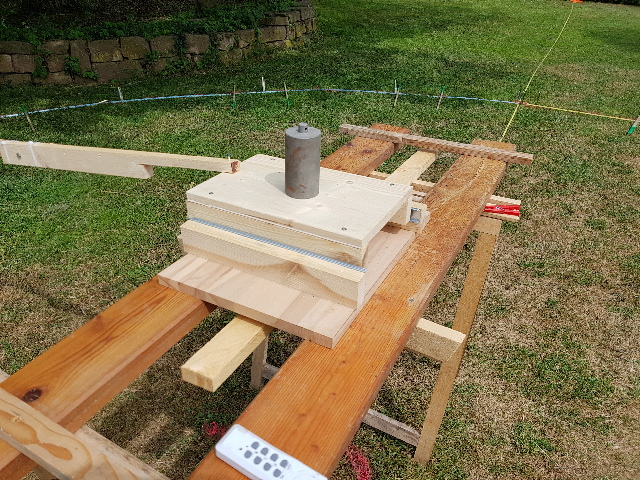
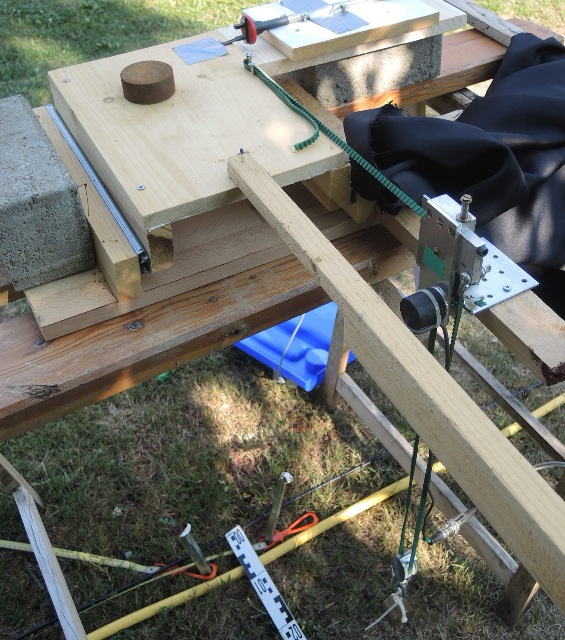
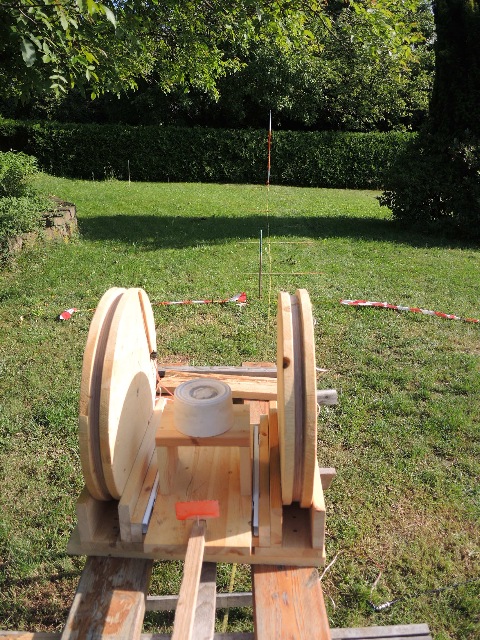
3. Oszillierende Drehbewegung einer Pertinax-Scheibe
 |
| Abb. 03-01: 1.6.2018, Eine Scheibe
aus Pertinax wird bei gleicher Geschwindigkeit
abwechselnd links- und rechtsherum gedreht. Ein
Taktgenerator schaltet über ein Relais die
Drehrichtung um. Frequenz: 0.166 Hz (n= 10/min), 50% DutyCylcle, Bewegung jeweils etwa eine halbe Umdrehung. (FB) |
 |
| Abb. 03-02: 1.6.2018 Scheibe aus
Pertinax und Synchronmotor mit schaltbarem Getriebe.
(FB) |
 |
| Abb. 03-03: nicht mit dem Motor
sondern mit einer Schubstange wird die Scheibe
periodisch gedreht (Kurbelantrieb) (FB) |
 |
| Abb. 03-04: Periodischer Antrieb mit
Schubstange (FB) |
4. Auswertung 2018
Für die Aufmessung der Strukturen war ein Meßkreis mit 4 m Radius ausgelegt.
Dort wurden die Richtung von beobachteten mit Hilfe von Holzstäben, Wäscheklammern usw. markiert
Mit Hilfe von zwei Maßbändern, die am Umfang des Kreises befestigt waren, konnte der jeweilige Winkel für diese Richtung aus der Strecke am Umfang errechnet werden.
Positive Winkel bzw. Strecken: Richtung Osten,
negative Winkel bzw. Strecken: Richtung Westen.
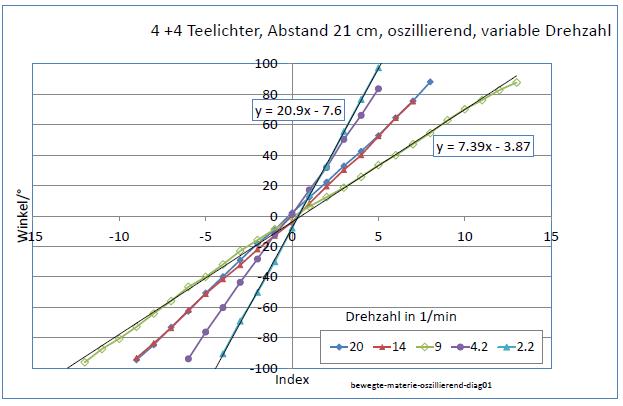 |
| Abb.04-01: 25.5.2018, Bewegung
Süd-Nord, Null der Winkelskala bei Nord. Vier plus vier Teelichter im Abstand von 21 cm werden bei unterschiedlichen Drehzahlen oszillierend bewegt. Links und rechts von der Bewegungsachse findet man auf dem Maßkreis jeweils Strukturen in unterschiedlichen Richtungen. Bei mittlerer Drehzahl liegen die einzelnen Richtungen dicht zusammen, bei niedriger und hoher Drehzahl weiter auseinander. Noch Forschungsbedarf. Mittlerer Winkelabstand von 7.4 ° bis 20.9 ° |
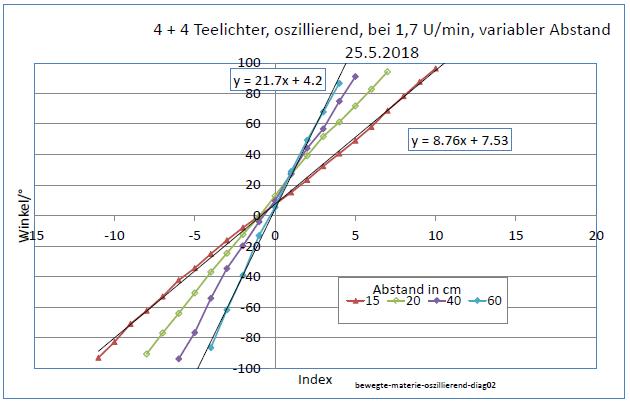 |
| Abb. 04-02: Bewegung Süd-Nord, Null
der Winkelskala bei Nord. Vier plus vier Teelichter m variablen Abstand werden beigleicher Drehzahl oszillierend bewegt. Links und rechts von der Bewegungsachse findet man jeweils Strukturen in unterschiedlichen Richtungen. Bei geringem Abstand liegen die Richtungen dicht zusammen, bei großem weit auseinander. Mittlerer Winkelabstand von 8.7 ° bis 21.7 °. |
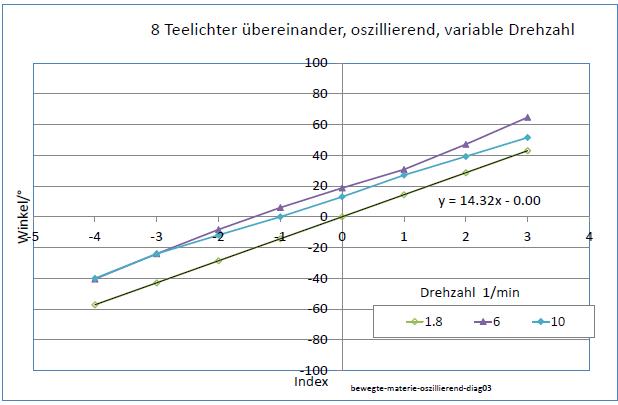 |
| Abb. 04-03: 25.5.2018 Acht Teelichter
übereinander bei unterschiedlichen Drehzahlen. Der Winkelabstand der einzelnen Richtungen ist unabhängig von der Drehzahl, die Hauptrichtung ändert sich aber um etwa 20 Grad nach Osten. Mittlerer Winkelabstand: 14 ° |
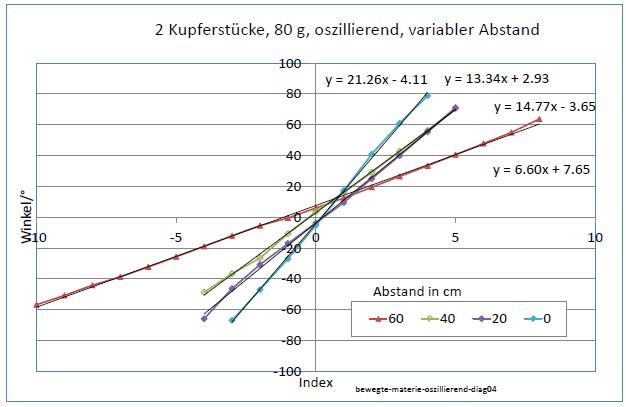 |
| Abb. 04-04: 26.5.2018 Zwei
Kupferstücke bei unterschiedlichem Abstand. Der größte Winkelabstand der Richtungen ergibt sich, wenn beide in der Mitte übereinander liegen. Liegen die Stücke weit auseinander, ergeben sich kleine Winkelabstände von 6 ° bis 21 °, Drehzahl 6 U/min |
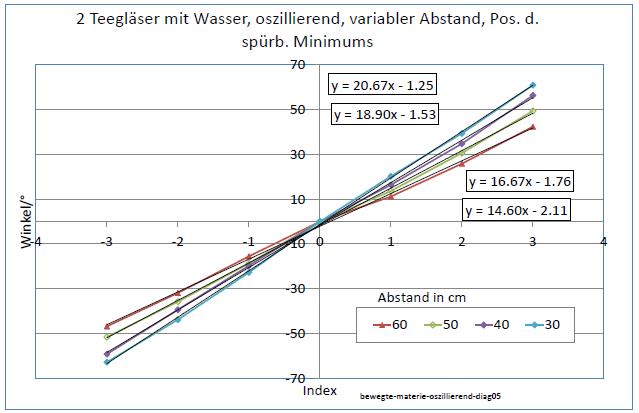 |
| Abb. 04-05: 27.05.2018 Zwei Teegläser
mit Wasser, Bewegung Nord-Süd, Beobachtung Nord-Süd Drehzahl 6 U/min, Winkelpositionen der spürbaren Minima in Abhängigkeit vom Abstand der beiden Teegläser. Mittlerer Winkelabstand zwischen 14 ° und 20.6 °. |
 |
| Abb. 04-06: Simulation: Überlagerung
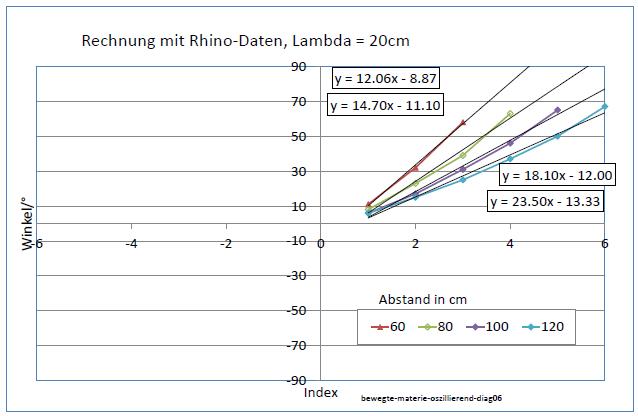
von zwei Kreisring-Systemen mit variablem Abstand. Bestimmung der Richtungen der Minima bei unterschiedlichen Abständen. Der mittlere Winkelabstand verändert sich von 12 ° bis 23.5 °. Gerechnet für eine Wellenlänge (Abstand der Kreisradien) von 20 cm. |
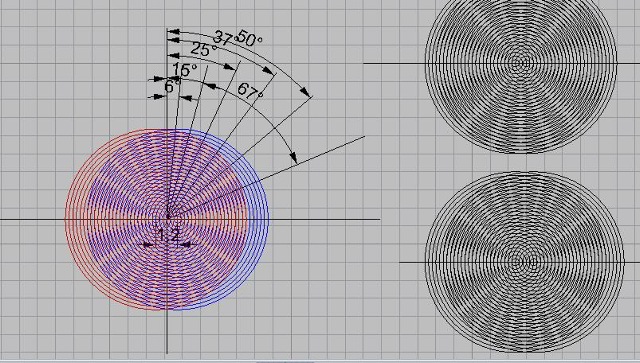 |
| Abb. 04-07: Simulation: Überlagerung
von zwei Kreisring-Systemen mit variablem Abstand. Bestimmung der Richtungen der Minima. |
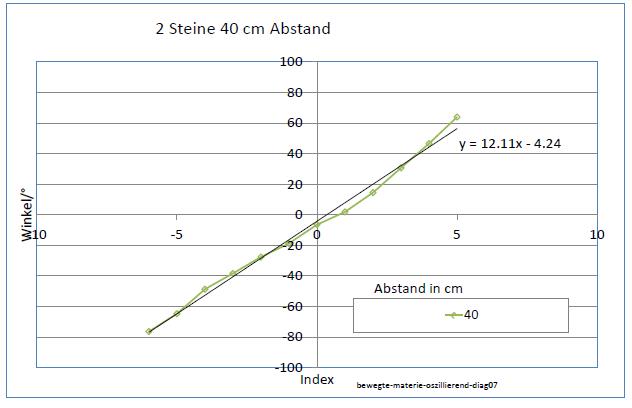 |
| Abb. 04-08: 26.5.2018 Zwei Steine aus
der Fränkischen Schweiz (Jura?) im Abstand von 40 cm Bewegung Nord-Süd, Beobachtung Nord-Süd. Drehzahl des Motors: 6 U/min Mittlerer Winkelabstand der einzelnen Richtungen: 12 °. |
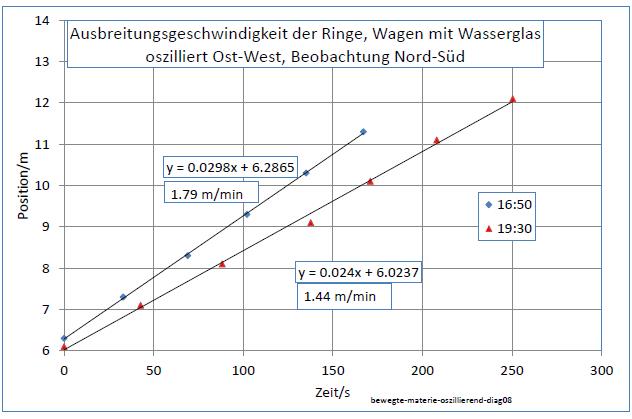 |
| Abb. 04-09: 4.6.2018, Wagen mit einem
Wasserglas, oszilliert Ost-West, Beobachtung
senkrecht dazu. Es gibt ringförmige Strukturen, die mit der Zeit nach außen wandern. Zur Bestimmung der Ausbreitungsgeschwindigkeit wurde jeweils ein Ring verfolgt und dabei alle 30 Sekunden dessen Position protokolliert. Zwischen den beiden Meßreihen liegen etwa drei Stunden. Drehzahl des Motors: 5.66 U/min |
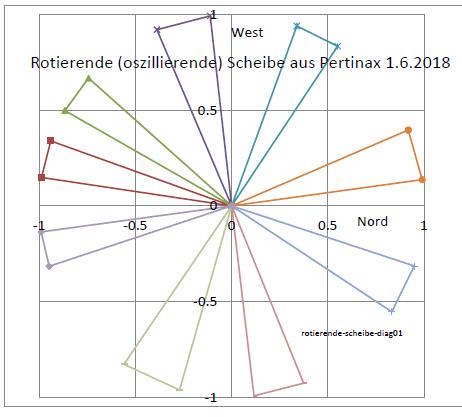 |
| Abb. 04-10: Rotierende Scheibe aus
Pertinax, oszillierende Bewegung (7 cm Hub am
Umfang). Acht Segmente (oder neun?) 0.1666 Hz, 10 Hin- und Herbewegungen des Motors/Minute |
 |
| Abb. 04-11: 5.7.2018,
kreisender Eisenzylinder, (die Scheibe mit der
Pleuelstange liegt rechts ohne Wirkung) (FB) |
5. Experimente mit verbesserter Bewegungseinrichtung (nahezu ruckfrei)
23.06.2018,
 |
| Abb. 05-00-01: |
 |
| Abb. 05-00-02: |
 |
| Abb. 05-00-03: |
 |
| Abb. 05-00-04: |
 |
| Abb. 05-00-05: |
 |
| Abb. 05-00-06: |
 |
| Abb. 05-00-07:
Psi-Track??? |
 |
| Abb. 05-00-08: |
 |
| Abb. 05-01: 23.06.2018,
Motorwelle kugelgelagert, einfache Bohrungen in der
hölzernen Pleuelstange (FB) |
 |
| Abb. 05-02: 29.06.2018, Getriebe 1:7
(Schleifstein mit Handkurbel) (FB) |
 |
| Abb. 05-03: 04.07.2018, Kugellager in der Pleuelstange, bessere seitliche Führung, Holzstab als Bremse an der Pertinax-Scheibe (FB) |
 |
| Abb. 05-03a: Schubladenführung für
das Pleuel |
 |
| Abb. 05-04:
26.07.2018 Über einen grünen Zahriemen wird
die Bewegung des Tisches vom einem Winkelgeber
aufgezeichnet. Mit dieser Anordnung läßt sich
jegliches Spiel im Antrieb quantitativ ermitteln.
(FB) |
 |
| Abb. 05-04a: 24.7.2018 Zahnriemen und
Winkelgeber, oben eine Lichtschranke (nicht tauglich
für die Messung) (FB) |
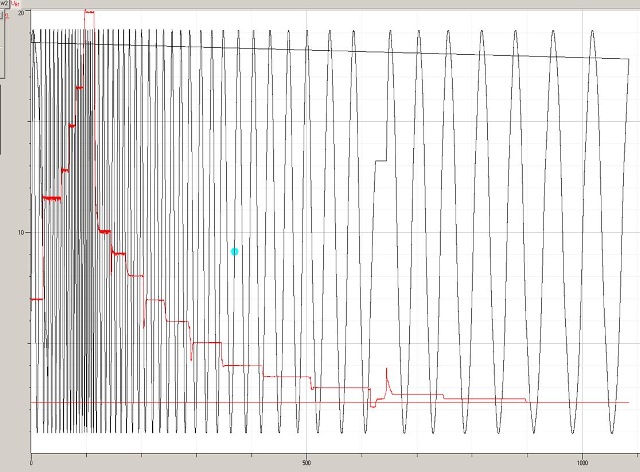 |
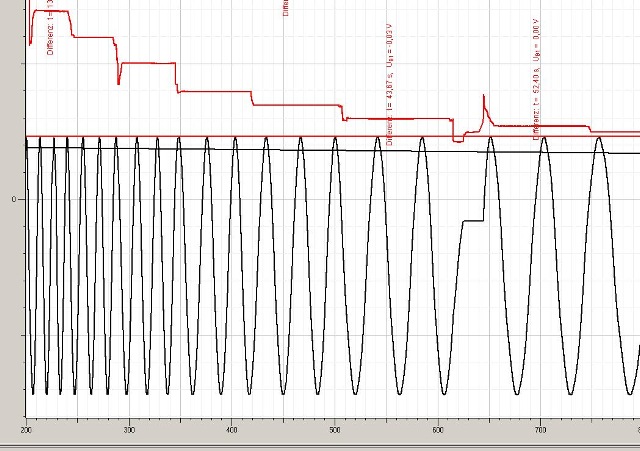
| Abb. 05-05: Bewegung des Tisches (schwarz) (Hub: 7 cm) und Motorspannung (rot) |
 |
| Abb. 05-06: Bewegung des Tisches (schwarz) und Motorspannung (rot) |
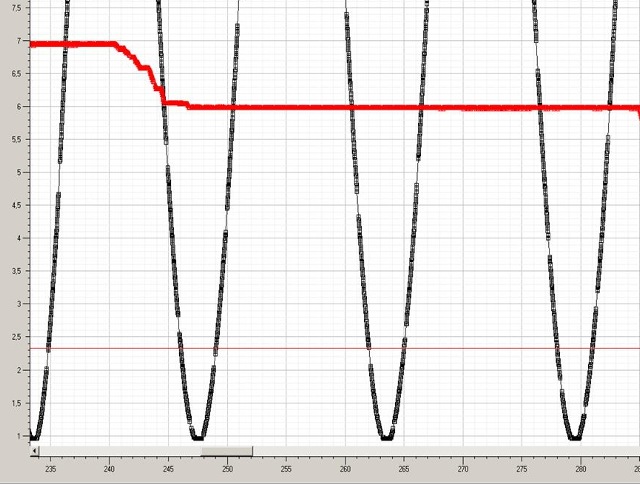 |
| Abb. 05-07: Bewegung des Tisches
(schwarz) und Motorspannung (rot) mit eingeblendeten
Meßpunkten. Innerhalb der Auflösung des Systems ist
kein Spiel im Antrieb zu beobachten (FB) |
 |
| Abb. 05-08: 26.07.2018,
neuer Getriebemotor und mit Zahnriemen angesteuerter
Winkelgeber (FB) |
 |
| Abb. 05-08:
26.07.2018 Winkelgetriebe, Winkelgeber unten
an der Abtriebswelle (FB) |
 |
| Abb. 05-09: 5.7.2018, Versuch mit
einem Drehzahlregler (FB) |
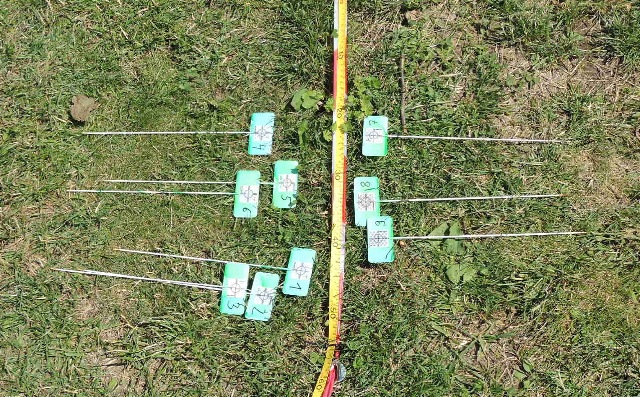
Wenn das Objekt einige Zeit hin- und hergefahren wurde, dann gibt es eine sternförmige Struktur mit vielen nach außen zeigenden Elemente.
Deren Richtungen wurden jeweils mit zwei Markierungen (Holzstöcke) am Meßkreis ausgelegt.
Der zugehörige Winkel ergibt sich aus der Ablesung am außen am Kreis ausliegenden Maßband.
Je nach Material des Objektes ergeben sich unterschiedliche Periodizitäten.
 |
| Ab. 05-10: 23.06.2018 Der
Meßkreis hat einen Radius von 4 m. (FB) |
 |
| Abb. 05-11: 23.06.2018 Die Breite der
Streifen ist jeweils mit zwei Hölzern markiert (FB) |
 |
| Abb. 05-12: 24.06.2018, 4,1 kg Blei
auf dem Verfahrtisch (FB) |
 |
| Abb. 05-13: 24.06.2018,
grüne Gurke (FB) |
 |
| Abb. 05-14: 24.06.2018,
1639g Wismut (FB) |
Der Abstand der einzelnen Elemente am Meßkreis hängt vom Material des bewegten Objektes ab.
Bei + 90° und -90° d.h. senkrecht zur Bewegungsrichtung sind die Positionen zu größeren Winkeln hin etwas verschoben. Danach folgt wieder eine regelmäßige Zunahme.
 |
 |
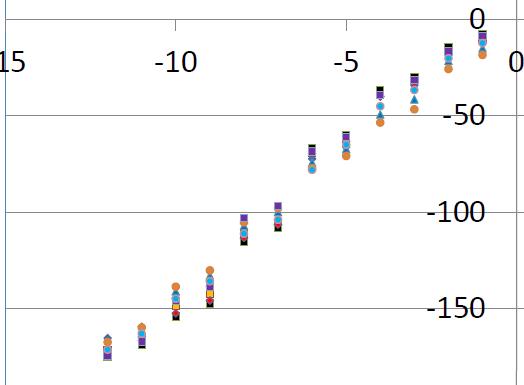 |
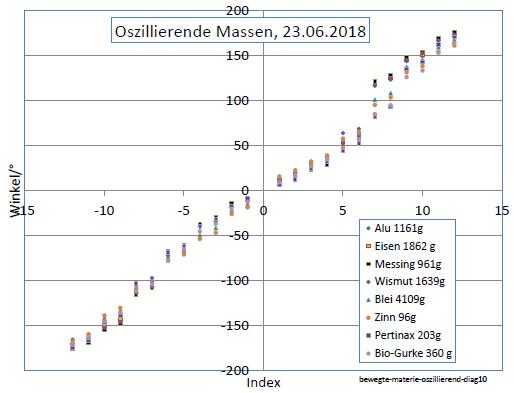
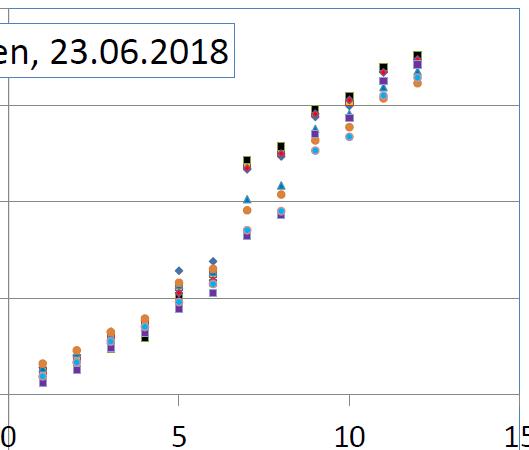
| Abb. 05-15: beobachtete
Winkelpositionen am Meßkreis mit 4 m Radius für die
unterschiedlichen Materialien. Bei + 90° und -90° d.h. senkrecht zur Bewegungsrichtung sind die Positionen zu größeren Winkeln hin etwas verschoben. (FB) |
Motordrehzahl und Antriebsspannung
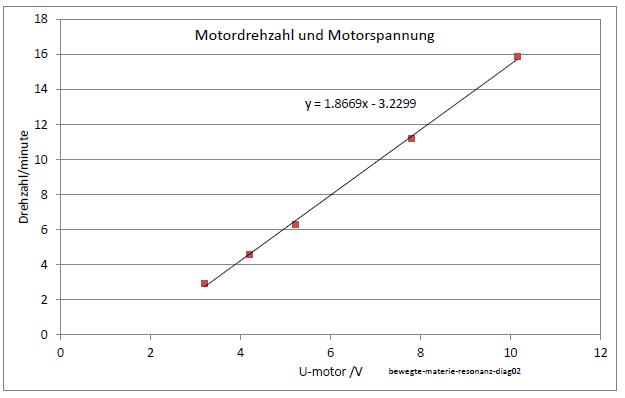 |
| Abb. 05-16: Motordrehzahl gegen
Motorspannung 28.6.2018 |
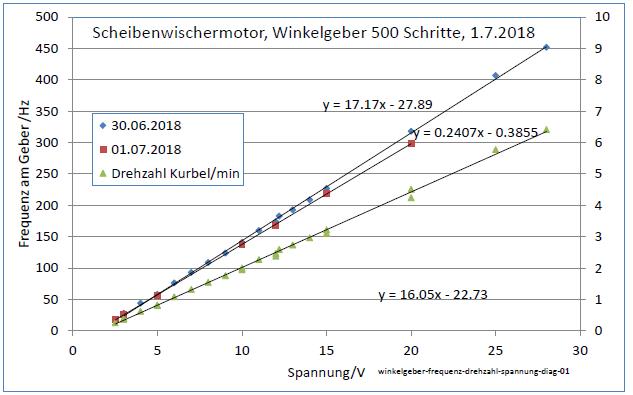 |
| Abb. 05-17: Motordrehzahl als
Frequenz am Winkelgeber über Motorspannung (FB) |
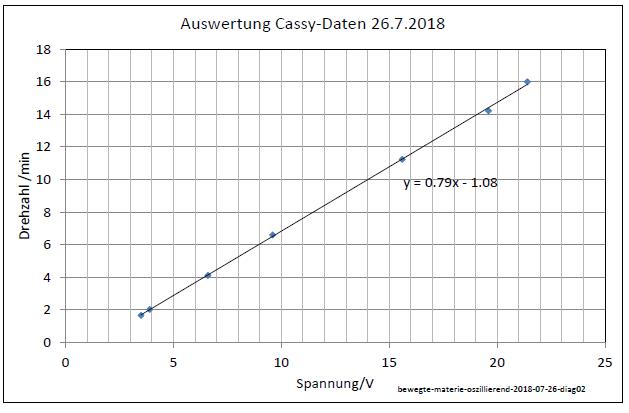 |
| Abb. 05-18: Motordrehzahl gegen
Motorspannung 26.7.2018 Auslesung der Winkelgeber über CASSY Impulseingang |
6. Orbital und Resonanzlinien bei periodischer Bewegung des Objektes
28.6.2018 und 26.7.2018
 |
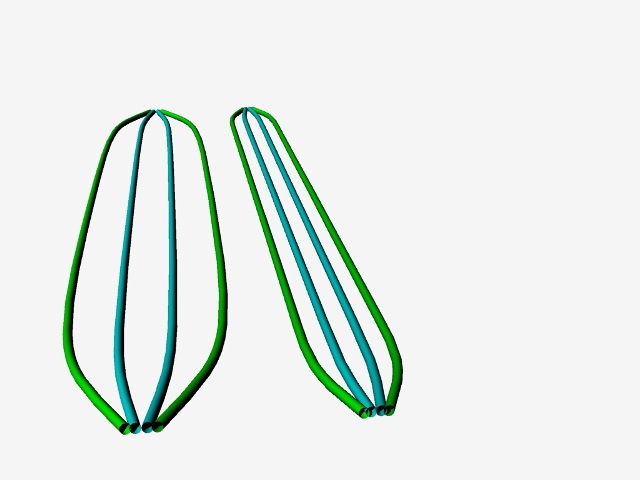
| Abb. 06-01: 26.7.2018, Orbital
schematisch: bei jedem Hub vergrößert sich der
Radius des Orbitals. (FB) |
 |
| Abb. 06-02: 28.6.2018. Bestimmung der
Anregung des Orbitals. Die Ausdehnung wurde
sowohl in Nord-Süd als auch in Richtung
Nord-Ost (rechts von der Eibe) gemessen. (FB) |
 |
| Abb. 06-03: Orbital, bei
jedem Hub vergrößert sich der Radius bis zur
ausgelegten Position (Frequenz f1: rote Häringe, f2:
grüne Marken, f3: rosa Marken usw. (FB) |
 |
| Abb. 06-04: Resonanz in
Blickrichtung zwischen beiden Eisenzylindern, der
hintere bewegt sich vor und zurück. Die Hölzer
markieren die Ränder der vier Resonanzlinien (FB) |
 |
| Abb. 06-05: Resonanzlinien,
links: bei Anregung erweitern sich die Abstände,
rechts: normal, (FB) |
 |
| Abb. 06-06: Resonanzlinien,
im Hintergrund die Positionen ohne Anregung, die
roten Häringe zeigen die Position der äußeren Linie
nach jedem Hub bei Anregung mit passender Frequenz.
(FB) |
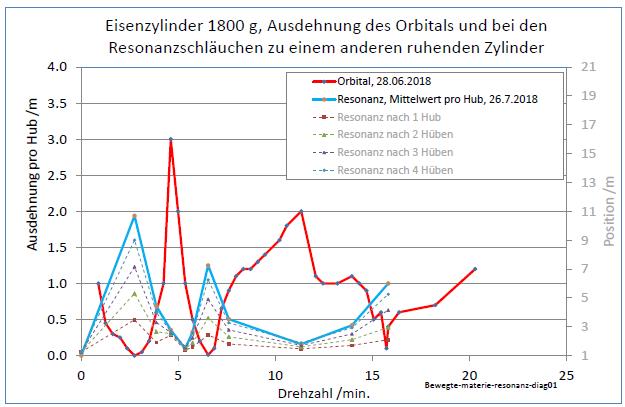 |
| Abb. 06-07: Orbital und
Resonanzlinien bei periodischer Bewegung des
Eisenzylinders. Es gibt Frequenzen, bei denen bei jedem Hub kräftige Zuwächse zu beobachten sind. Erstaunlicherweise verhalten sich Resonanzlinien und Orbital invers zueinander. Ist die Änderung beim Orbital groß, so ist sie bei den Linien klein. (FB) |
 |
| Abb. 06-08: Die Lage der
Resonanzlinien ist in frischem Schnee getrampelt.
Offensichtlich gibt es links ein Hindernis, denn die
Linien sind etwas unsymmetrisch nach rechts
verschoben (FB) |
 |
| Abb. 06-09: Anregung über eine
Kupferspule mit Ferritkern, Frequenzen: 2,0 Hz,
Strom (~ 1 mA)aus der Kopfhörerbuchse eines
SmartPhones. (FB) |
 |
| Abb. 06-10: Bei Anregung hat sich die
vordere Linie sehr weit nach außen (nach vorne im
Bild) geöffnet. Das Grundstück war zu klein,
um den gesamten Verlauf im Schnee zu markieren. psi-track-026.htm (FB) |
7. PsiTrack zu einem oszillierendem Objekt
 |
| Abb. 07-01: Der Eisenzylinder war
Zielobjekt für einen rund 5 km langen PsiTrack. Der
Track kam von Süden zum Objekt (im Foto von links),
senkrecht zur Blick- und Bewegungsrichtung des
Tisches (Ost-West-Richtung). psi-track-026.htm (FB) |
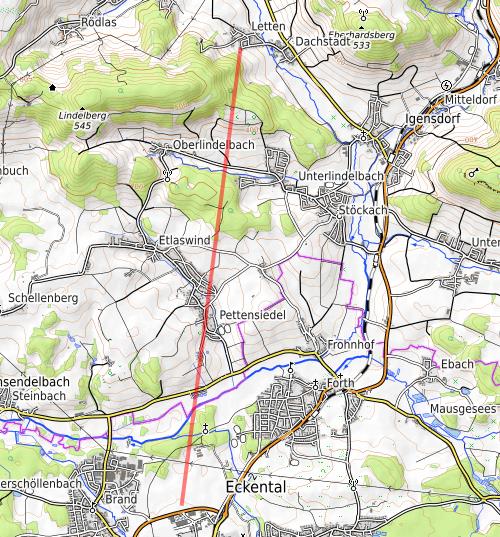 |
| Abb. 07-02: Der PsiTrack wurde von
Eckental zum Eisenzylinder in Letten gelegt. (FB) |
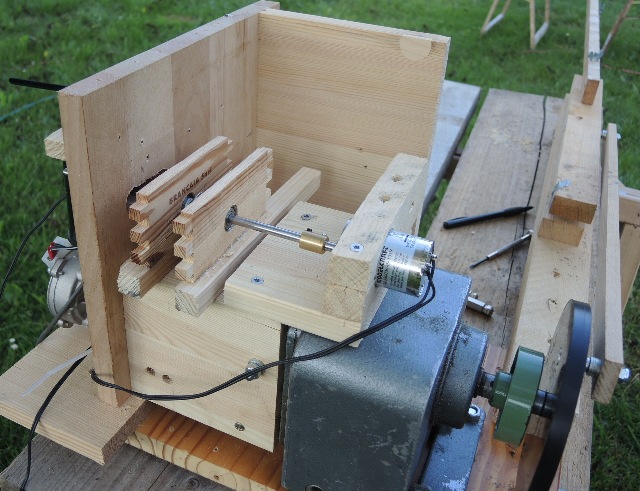
8. Fortsetzung der Versuche Mai, Juni 2019
8.1 Verbesserter Aufbau
helmholtz-spule.htm
 |
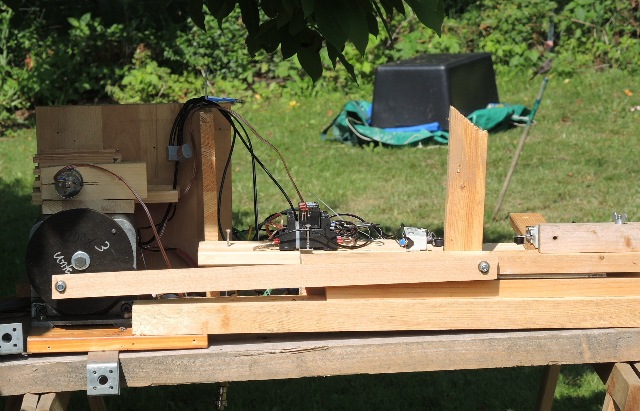
| Abb. 08-01-01: Ein großes
mechanisches Getriebe Übersetzung 1:100 wird vom
Gleichstrommotor angetrieben. Auf der Getriebewelle sitzt die Kurbelscheibe. (FB) |
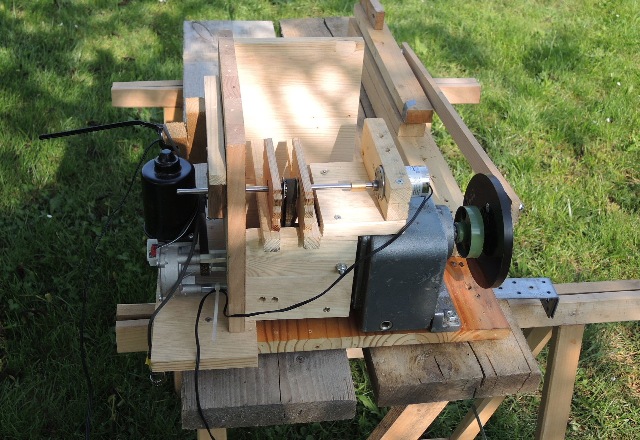 |
| Abb. 08-01-02: links der
Gleichstrommotor von 2018, rechts oben ein kleinerer
Gleichstrommotor, der über einen Zahnriemen
alternativ mit dem Getriebe verbunden werden kann.
(FB) |
 |
| Abb. 08-01-03: kleiner
Gleichstrommotor (FB) |
 |
| Abb. 08-01-04: bei der Bewegung
entstehen Strukturen, ausgelegte Meßmarken in
Nord-Richtung (FB) |
 |
| Abb. 08-01-05: Anordnung etwa wie
2018, Ziegelstein und zwei Meßstrecken, Richtung
Nord und Nord-Ost (FB) |
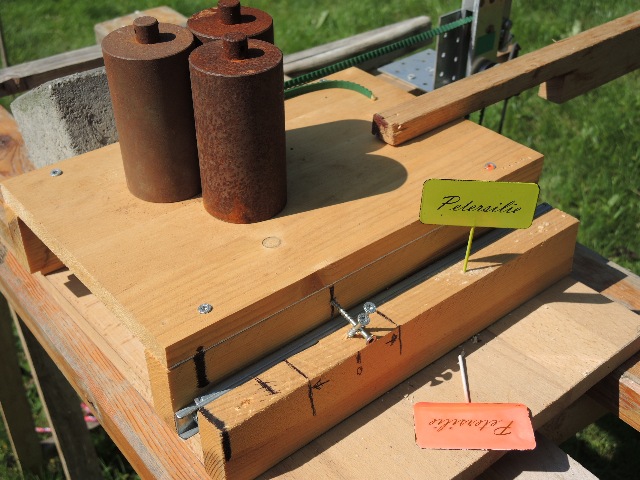 |
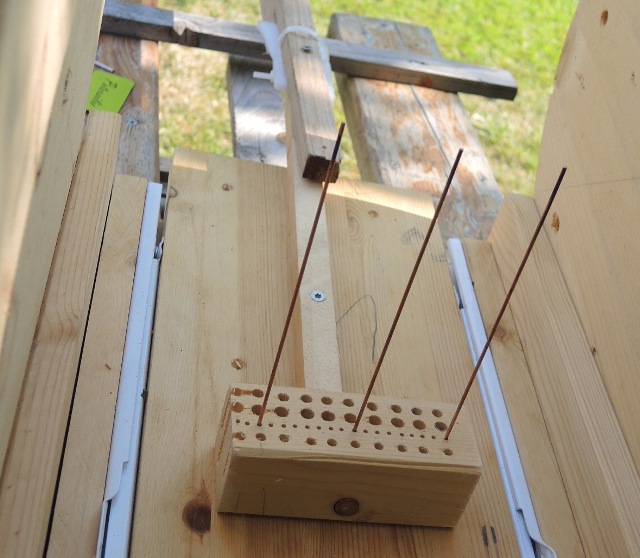
| Abb. 08-01-06: drei Eisenzylinder auf
dem Verfahrtisch, die Markierungen daran zeigen die
Endpunkte der sinusförmigen Bewegung. Die Spitze der
Schraube markiert die aktuelle Position.
(FB)(FB) |
 |
| Abb. 08-01-07: Verfahrtisch von 2018,
prismatischer Bleiklotz, der Zahnriemen läuft über
eine Winkelgeber, mit dem sich die Bewegung
verfolgen läßt. (FB) |
 |
| Abb. 08-01-08: Der Motor wird so
angesteuert, daß er im Winkelbereich von etwa 90°
hin und her pendelt. (FB) |
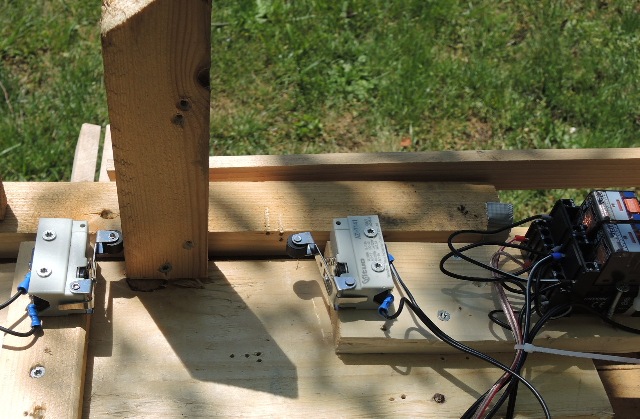 |
| Abb. 08-01-09: Zwei Endschalter und
Relais sorgen für die Hin- und Herbewegung (FB) |
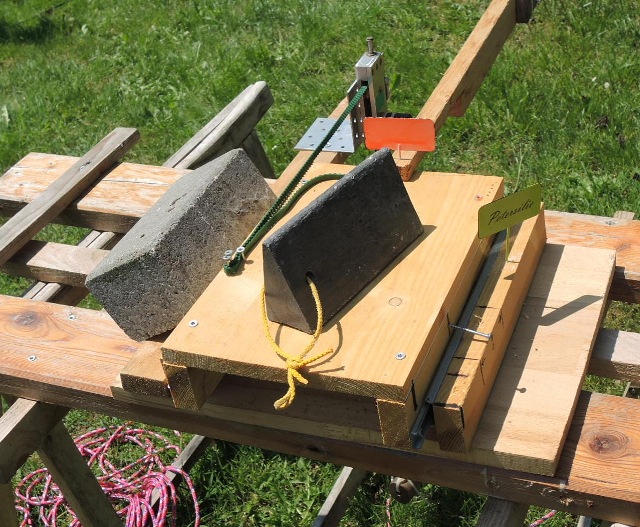
8.2 Unterschiedliche Probekörper auf dem Verfahrtisch, Ziehrichtung, Wachstumsrichtung, Form und Orientierung
Der Tisch fährt Ost-West, ganz langsam 3,26 Minuten / Hub
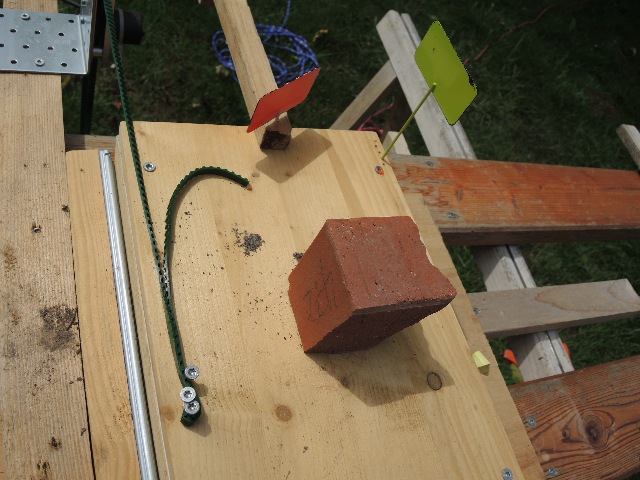 |
| Abb. 08-02-01: Abschnitt von einem
roten Ziegelstein, über den grünen Zahnriemen wird
ein Drehgeber angetrieben, um die Position
aufzuzeichnen. (FB) |
 |
| Abb. 08-02-02: zylindrischer
Gipsklotz, 687g (FB) |
 |
| Abb. 08-02-03: Prismatischer
Bleiklotz 4109g (FB) |
 |
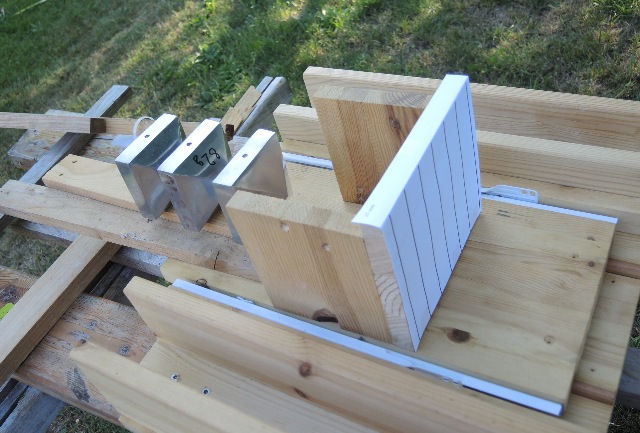
| Abb. 08-02-04: Messingzylinder 961g
(FB) |
 |
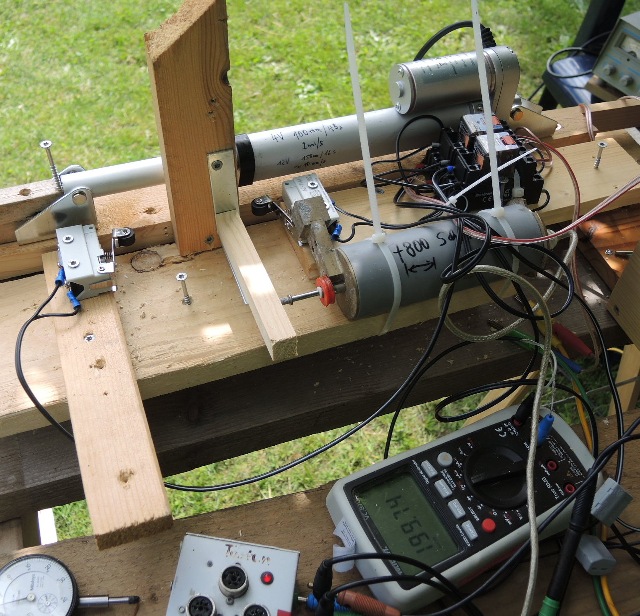
| Abb. 08-02-05: Zwei Messeinzylinder
übereinander 961g und 778g in gleicher
Ziehrichtung. (FB) |
 |
| Abb. 08-02-06: Zwei Messeinzylinder übereinander 961g und 778g in unterschiedlicher Ziehrichtung. (FB) |
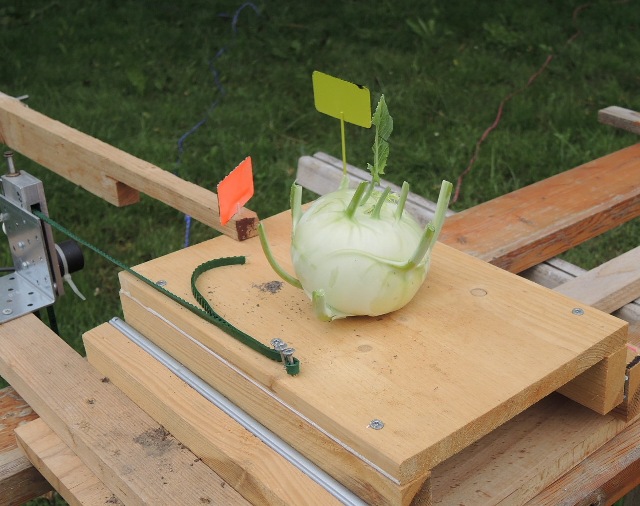 |
| Abb. 08-02-07: Kohlrabi, Spitze
(Wachstumsrichtung) nach oben (FB) |
 |
| Abb. 08-02-08: Kohlrabi,
Wachstumsrichtun nach unten (FB) |
 |
| Abb. 08-02-09: Kohlrabi (FB) |
 |
| Abb. 08-02-10: Zwei große Monozellen,
Pluspol oben (Fb) |
 |
| Abb. 08-02-11: Zwei große Monozellen,
Pluspol nach unten (FB) |
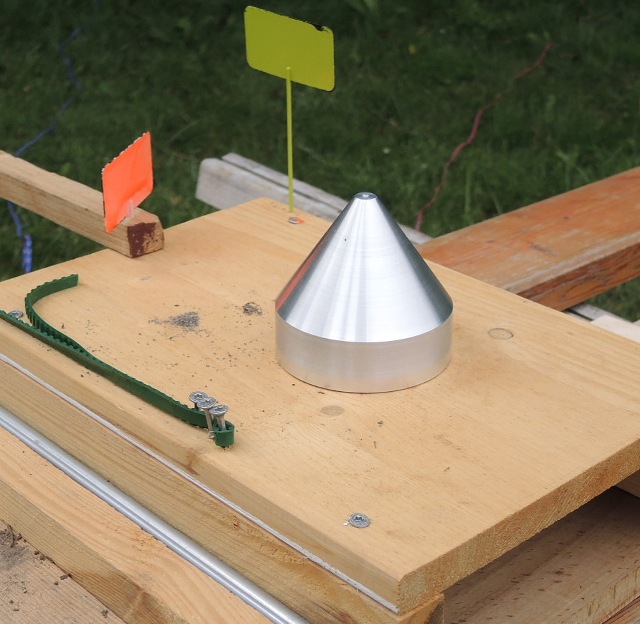 |
| Abb. 08-02-12: Konischer Körper,
Kegel aus Aluminium, Spitze nach oben (FB) |
 |
| Abb. 08-02-13: Aluminium-Kegel,
Spitze nach unten (FB) |
 |
| Abb. 08-02-14: starker
Permanentmagnet (FB) |
 |
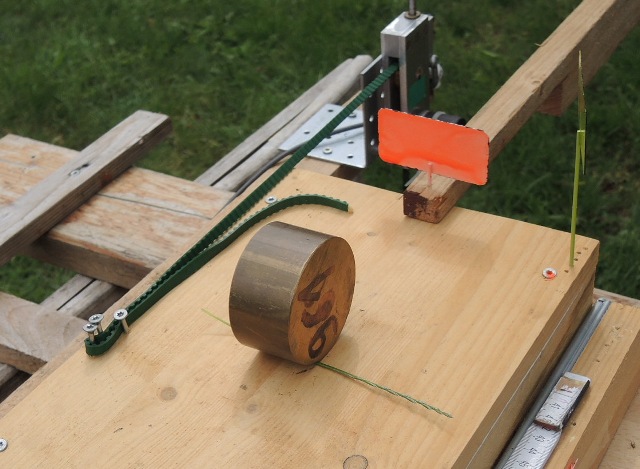
| Abb. 08-20-15: Eisenzylinder 414g,
(FB) |
 |
| Abb. 08-02-16: mit Neodymmagneten
(Pinwand) Polung 1 oben (FB) |
 |
| Abb. 08-02-17: Neodymmagnet, Polung 2
oben (FB) |
8.3 Orientierung von Zylindern, Quadern und konischer Körper, Wismut
 |
| Abb. 08-03-01: Wismut, Quader, 1639
g, Stellung 1 (FB) |
 |
| Abb. 08-03-04: Wismut, Quader, 1639 g, Stellung 2 (FB) |
 |
| Abb. 08-03-05: Wismut, Quader, 1639 g, Stellung 3 (FB) |
 |
| Abb. 08-03-06: Messingzylinder 961g,
Achse horizotal (FB) |
 |
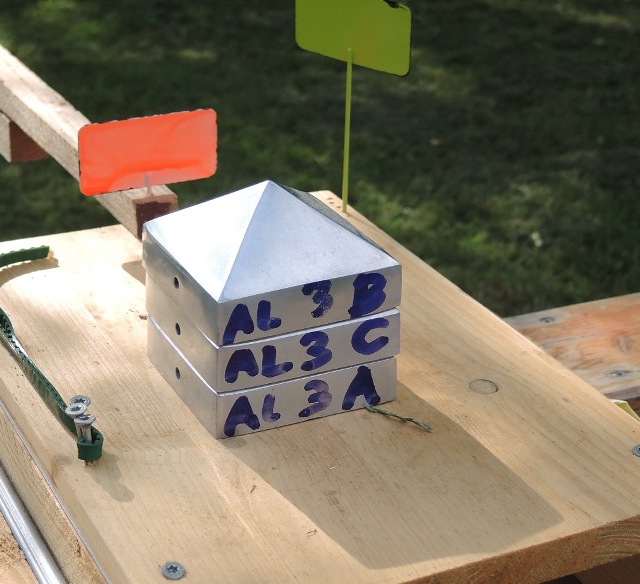
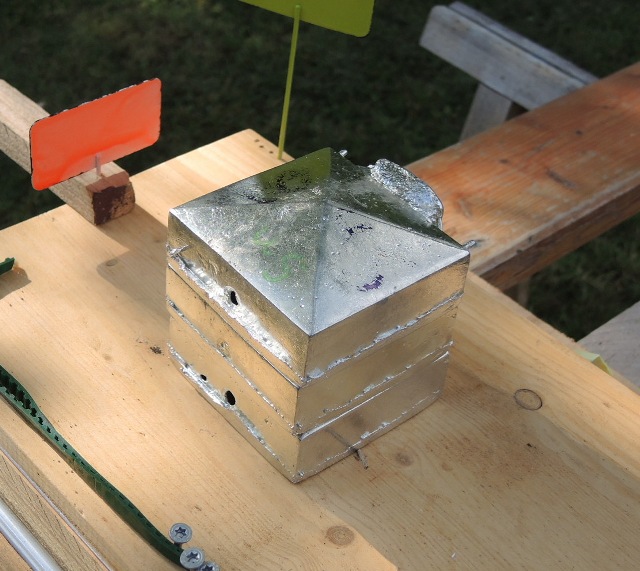
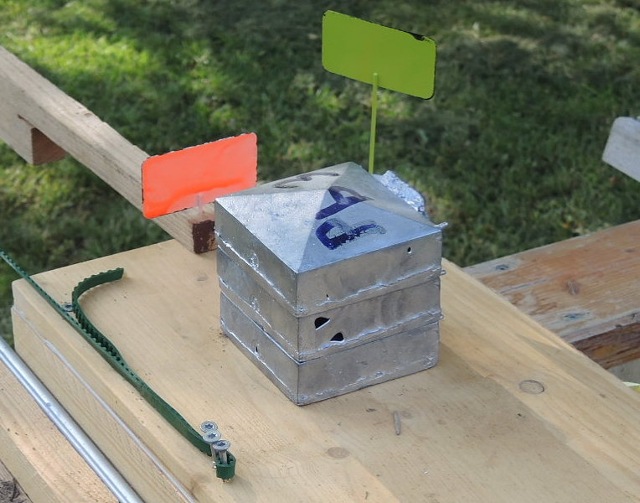
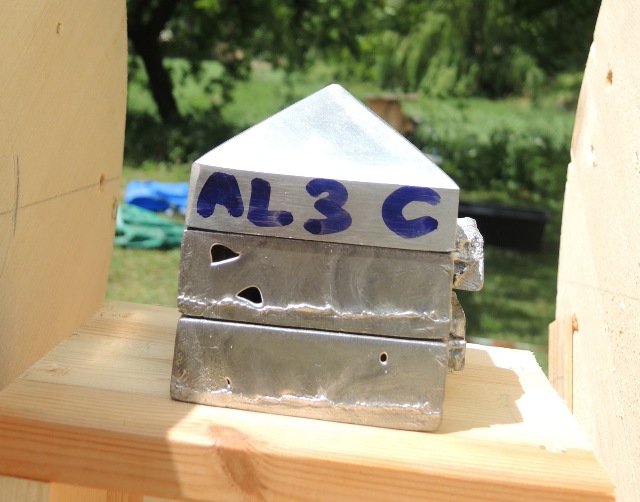
| Abb. 08-03-07: drei konische Körper
aus Aluminium konische-koerper.htm (FB) |
 |
| Abb. 08-03-08: drei konische Körper aus Aluminium konische-koerper.htm (FB) |
 |
| Abb. 08-03-09: drei konische Körper aus Zinn konische-koerper.htm (FB) |
 |
| Abb. 08-09-10: drei konische Körper aus Blei konische-koerper.htm (FB) |
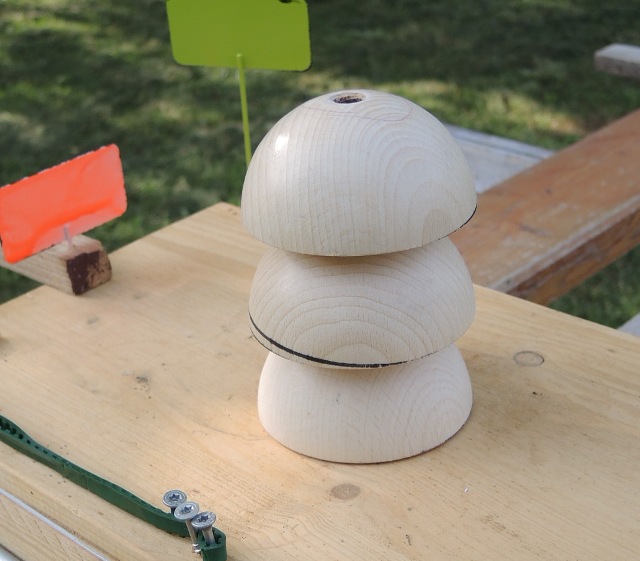 |
| Abb. 08-03-11: drei Halbkugeln aus Holz konische-koerper.htm (FB) |
 |
| Abb. 08-03-12: drei konische Körper aus Kupferblech konische-koerper.htm (FB) |
 |
| Abb. 08-03-13: drei konische Körper aus Edelstahlblech konische-koerper.htm (FB) |
 |
| Abb. 08-03-14: drei konische Körper aus verzinktem Eisenblech konische-koerper.htm (FB) |
 |
| Abb. 08-03-15: drei Halbkugeln aus Gips in Formen aus Plastik (FB) |
 |
| Abb. 08-03-16: konischer Körper aus Wismut konische-koerper.htm (FB) |
 |
| Abb. 08-03-17: konische Körper aus
verkupfertem Kunststoff (Contur-Generator) konische-koerper.htm (FB) |
 |
| Abb. 08-03-18: Contur-Generator konische-koerper.htm |
8.4 Einfluß von einer Helmholtz-Spule
aus helmholtz-spule.htm
1 nA entspricht 31,45 E-15 T oder 3.145E-02 pT
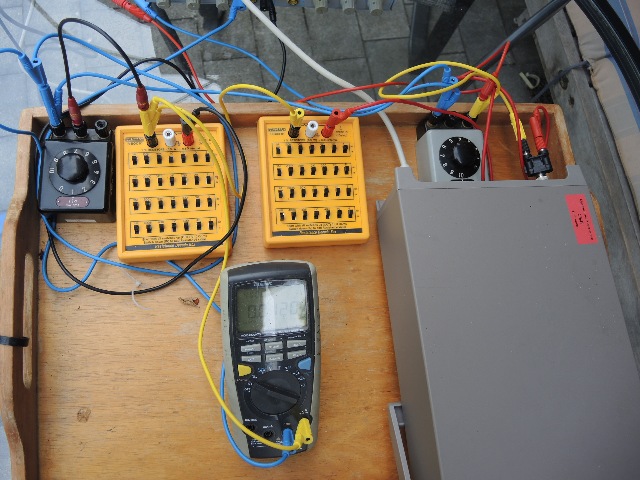 |
| Abb. 08-04-01: Über einen
Spannungsteiler (500 Ohm zu 1 Ohm, links schwarz und
gelb) wird eine Gleichspannung von einigen Millivolt
erreicht. Rechts ist ein Vorwiderstand 10 MOhm
(gelb) und ein Abschlußwiderstand (10kOhm) parallel
zur Helmholtz-Spule (FB) |
 |
| Abb. 08-04-02: Gleichspannungsquelle,
Meßgerät für die Millivolt-Spannung und
Strommeßgerät 29.87 mV entsprechen rechnerisch 2.987 nA (FB) |
 |
| Abb. 08-04-03: Strommessung mit einem
PICOAMMETER. Anzeige: 2.977 nA (nanoAmpere) entspricht einem Magnetfeld in der Spule mit etwa 0.1 pT Im Vergleich zum Erdmagnetfeld von 40 µT ist das durch die Spule bei 3 nA zusätzlich erzeugte Feld etwa um den Faktor von 400 Millionen schwächer! (FB) |
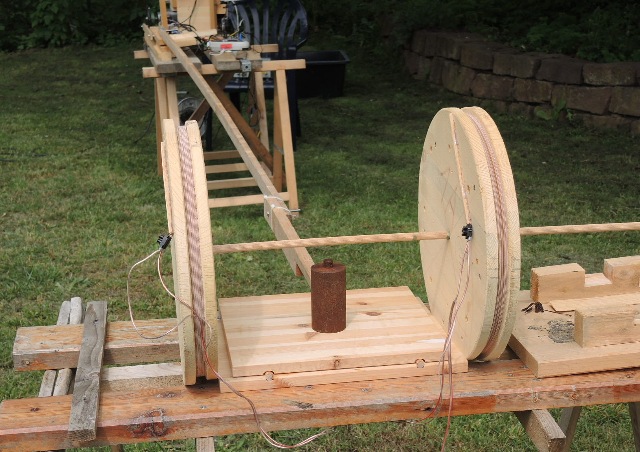 |
| Abb. 08-04-04: Verfahrtisch mit
Parallelführung durch Nuten und eingeleimte
Buchenstäbe Eisenzylinder 1834g wird zwischen den beiden Spulen bewegt. (FB) |
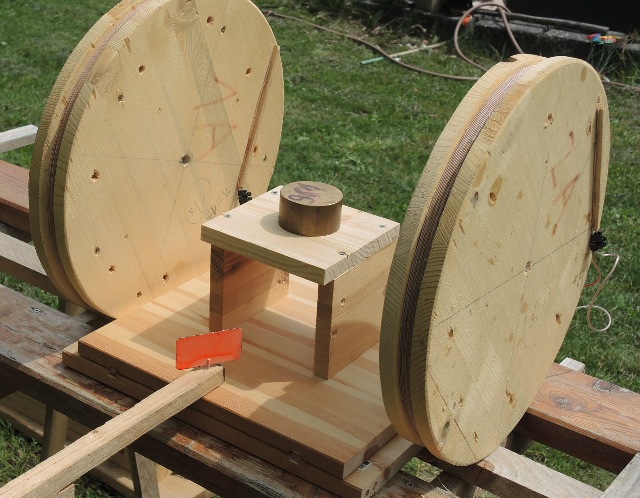 |
| Abb. 08-04-05: Messingzylinder 961g,
breiter hölzerner Verfahrtisch (FB) |
 |
| Abb. 08-04-06: schmaler Verfahrtisch
mit hölzerner Führung (FB) |
 |
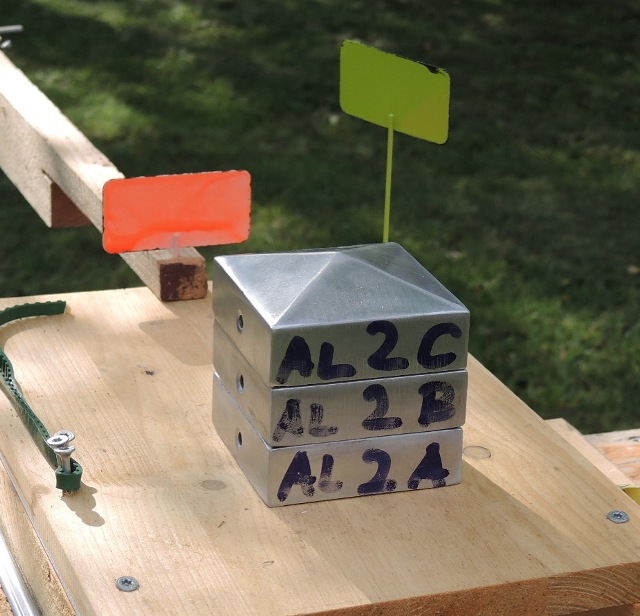
| Abb. 08-04-07: zwei konische Körper
aus Aluminium übereinander (FB) |
 |
| Abb. 08-04-08: Verfahrtisch mit
Rollenführung für eine Schublade (FB) |
Meßkreis mit sieben Meter Durchmesser
 |
| Abb. 08-04-09: der Meßkreis ist
ausgelegt. (FB) |
 |
| Abb. 08-04-10: Zur Markierung der
Strukturen dienen nummerierte Meßmarken aus Blech
(FB) |
 |
| Abb. 08-04-11: Häringe halten das
Flatterband, daran sind zwei Maßbänder befestigt. Die Nullmarke beider Bänder ist im Norden des Kreises. Das eine liegt entlang der westlichen, das andere entlang der östlichen Hälfte des Kreises. (FB) |
 |
| Abb. 08-04-12: Zur Ausrichtung der
Bewegungsrichtung wird ein Kompaß verwendet. (FB) |
 |
| Abb. 08-04-13: zwei konische körper
aus Blei nebeneinander (FB) |
 |
| Abb. 08-04-14: drei konische körper
aus Blei nebeneinander (FB) |
 |
| Abb. 08-04-15: zwei konische Körper
aus Blei übereinander (fB) |
 |
| Abb. 08-04-16: zwei konische Körper
aus Blei übereinander, dazwischen eine hölzerne
Halbkugel (FB) |
 |
| Abb. 08-04-17: zwei konische Körper
aus Blei, darüber eine Körper aus Aluminium (FB) |
 |
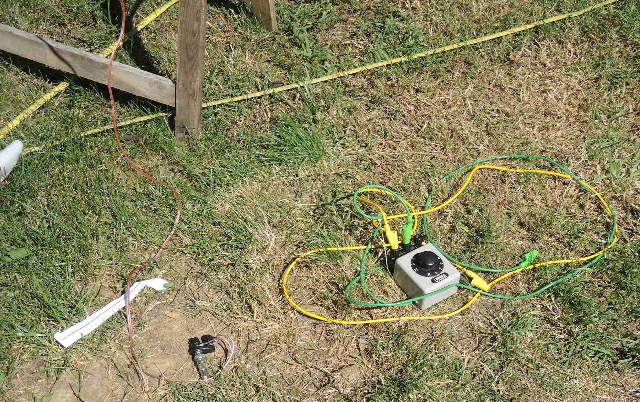
| Abb. 08-04-18: Bewegung in
Nord-Süd-Richtung, der Antriebsmotor befindet sich
in der Nähe einer wasserführenden Struktur im Boden.
(FB) |
 |
| Abb. 08-04-19: Blick ungefähr in
Richtung Norden (FB) |
9. Modifikation des Aufbaus
9.1 Weitere Antriebe, Teil einer sinusförmigen Bewegung
 |
| Abb.09-01-01: Ansteuerung der
Gleichstrommotoren mit PWM-Drehzahlsteller (FB) |
 |
| Abb. 09-01-02: links: großes Getriebe
mit Kurbelscheibe, in der Mitte Umschaltrelais und
rechts zwei Endschalter. Der Motor läuft nicht dauernd in einer Richtung, sondern schwenkt im Bereich von etwa 90° immer hin und her. (FB) |
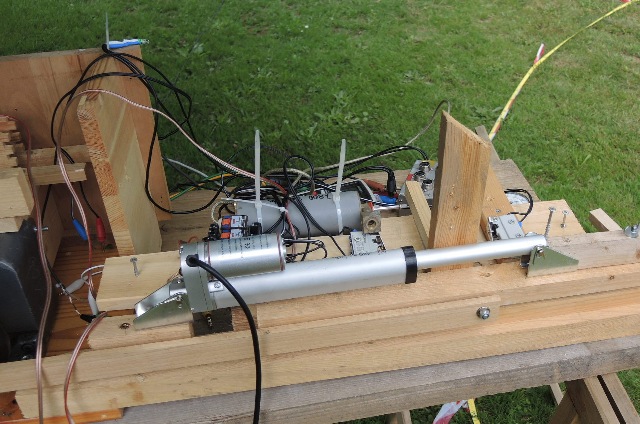 |
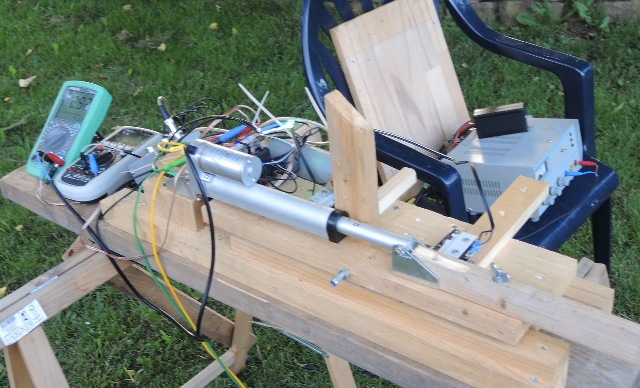
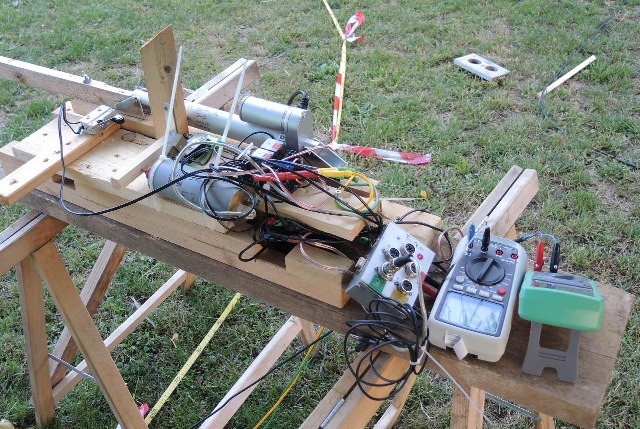
| Abb.09-01-03: mehrere Antriebe auf
der gleichen Unterlage rechts: Ein Linearmotor (elektrischer Hubzylinder zum Fensteröffnen) bewegt die Schubstange. Zwei Endschalter mit Relais sorgen für eine permanente Hin- und Herbewegung. (FB) |
 |
| Abb. 09-01-04: Die Geschwindigkeit
der Bewegung wurde mit einem inkrementalen Meßtaster
im grauen Plastikrohr ermittelt. Er mißt die Stellung der quer zur Bewegungsrichtung angebrachten Holzleiste. (Auflösung: 200 Schritte pro mm) (FB) |
9.2 Bewegung in unterschiedlichen Himmelsrichtungen
In Kapitel 11 sind die Ergebnisse zusammengefaßt. (Abb. 11-06f)
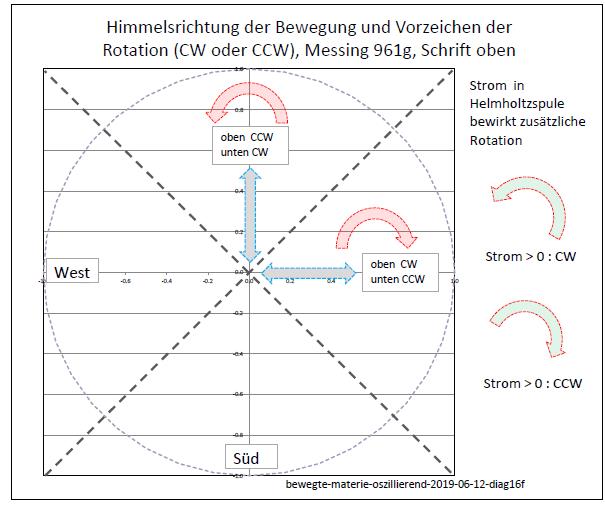
Die Himmelsrichtung der oszillierenden Bewegung sowie die Stromrichtung in der Helmholtzspule haben einen entscheidenden Einfluß auf das Rotieren der Strukturen!
In Zwischenhimmelsrichtung verändern sich die Strukturen nicht!
 |
| siehe Abb. 11-06f: |
 |
| Abb. 09-02-01:
Zwischenhimmelsrichtung: Richtung SW - NO (FB) |
 |
| Abb. 09-02-02: Zwischenhimmelsrichtung: Richtung SW - NO (FB) |
 |
| Abb. 09-02-03: Messingzylinder 961 g,
bei jedem Hub bleibt die Hauptrichtung der Struktur
unverändert. Dies zeigen die Meßmarken innerhalb des
Kreises. die äußeren Marken gehören zu einer
Aufstellung in Haupthimmelsrichtung. (FB) |
 |
| Abb. 09-02-04: Messingzylinder 961g, Richtung NW - SO (FB) |
 |
| Abb. 09-02-05: Richtung NW - SO, die Ausrichtung wurde mit dem Kompass im Vordergrund überprüft (FB) |
 |
| Abb. 09-02-06: Richtung NW - SO, am
Kreis sind einige Meßmarken ausgelegt. (FB) |
 |
| Abb. 09-02-07:
Zwischenhimmelsrichtung: Die Position des
Anfangs der Struktur ist bei jedem Hub nahezu
unverändert |
 |
| Abb. 09-02-08:
Zwischenhimmelsrichtung: Auch die Lage der
anderen Grenze der Struktur bleibt nahezu konstant.
(fB) |
 |
| Abb. 09-02-09: Ein Linearmotor
(elektrischer Hubzylinder zum Fensteröffnen) bewegt
die Schubstange. Zwei Endschalter mit Relais sorgen für eine permanente Hin- und Herbewegung. (FB) |
 |
| Abb. 09-02-10: Die Geschwindigkeit
der Bewegung wurde mit einem inkrementalen Meßtaster
im grauen Plastikrohr ermittelt. Er mißt die Stellung der quer zur Bewegungsrichtung angebrachten Holzleiste. (FB) |
 |
| Abb. 09-02-11: Die Strukturen von
diesem Gipszylinder reichen in Bewegungsrichtung bis
zum Zaun im Hintergrund (FB) |
 |
| Abb. 09-02-11: Die Schubstange wurde
verlängert, damit die Elektronik nicht auf einer
unterirdischen Wasserführung steht. Sie ist in der
Mitte auf einen Holzbock aufgelegt (FB) |
9.3 Antrieb mit Schrittmotor und Linearführung
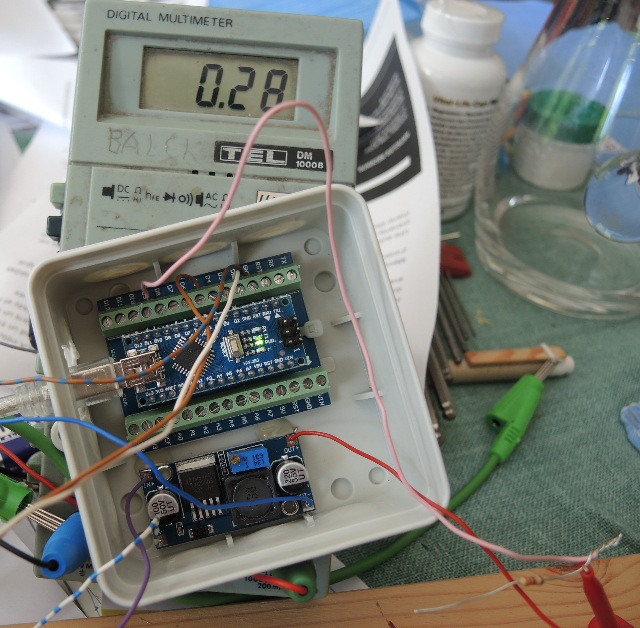 |
| Abb. 09-03-01: USB CNC
Schrittmotor-Steuerung Vanilla mit Software, Arduino
nano Prozessor (FB) |
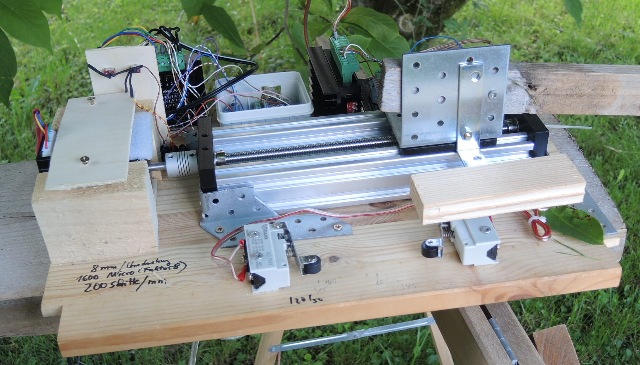 |
| Abb. 09-03-02: Linearführung und
Schrittmotor (links) , im Hintergrund links die
Arduino-Steuerung, rechts daneben ist alternativ ein Interface für MACH3-Software angebracht. Der Schlitten auf der Führung treibt die hölzerne Schubstange an. (FB) |
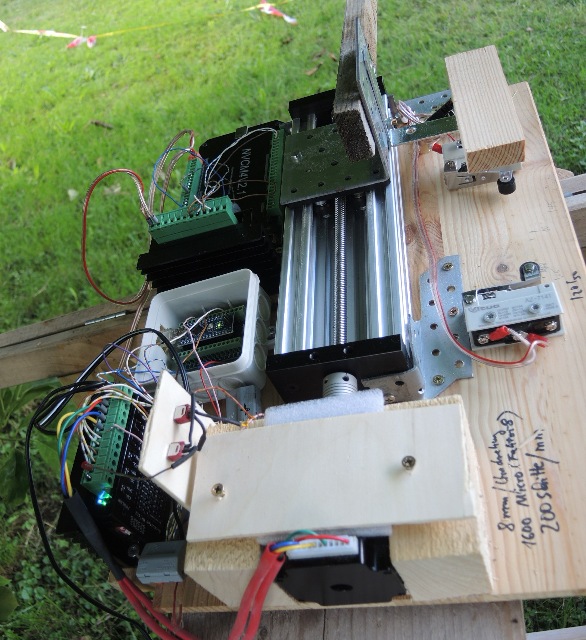 |
| Abb. 09-03-03: beide Steuerungen,
Schrittmotor und Linearführung. (FB) |
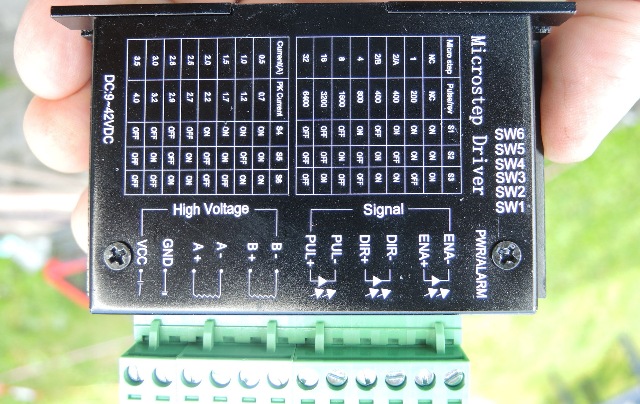 |
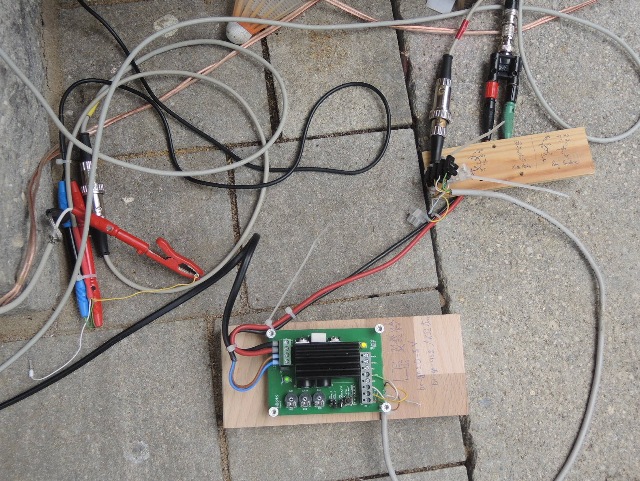
| Abb. 09-03-04: Leistungsverstärker für den Schrittmotor, aufgedruckt ist die Funktion der einzelnen Mikroschalter. Die Schaltung ist in der Lage bis zu 32 Mikrosteps zu erzeugen. (FB) |
 |
| Abb. 09-03-05: Mikroschalter 1-3 Anzahl der Mikrosteps (Off, On, Off = 8) , 4-6 Maximalstrom (FB) |
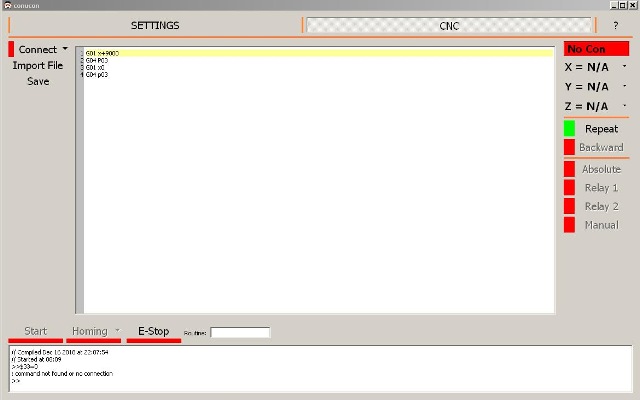 |
Abb. 09-03-06: Fenster mit den
CNC-AnweisungenG01 x+9000 % fahre zur Position x 9000 mm |
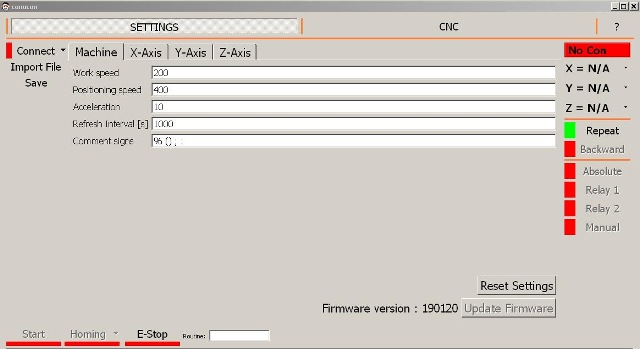 |
| Abb. 09-03-07: Einstellung der
Fahrbedingungen Work speed 200 mm/s Position speed 400 mm/s Acceleration 10 mm/s² Refresh interval 1000 Comment signs % () ; : |
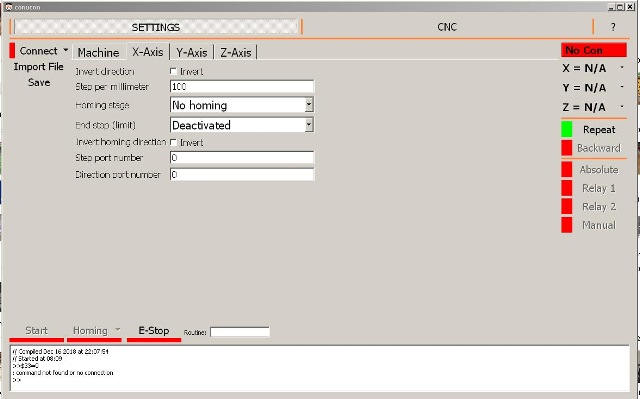 |
| Abb. 09-03-08: Einstellung X-Achse Step per millimeter 100 |
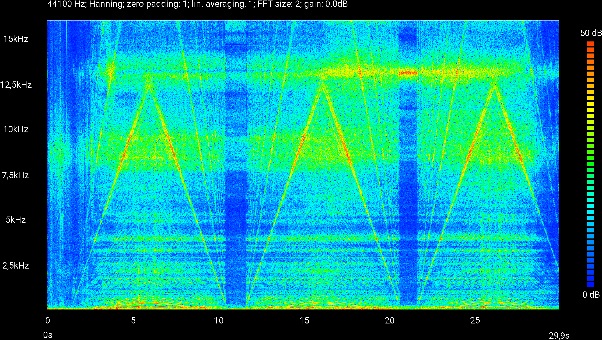 |
| Abb. 09-03-09: Mit dem Mikrofon des Smartphons aufgenommenes Geräusch: Anstieg und Abfall der Frequenz mit konstanter Geschwindigkeit. Daraus ergibt sich eine Bewegung mit konstanter Beschleunigung. |
10. Einfluß der Beschleunigung
10.1 Zum Vergleich: Beschleunigtes Objekt auf einer Wasseroberfläche
 |
| Abb. 10-01-01: Die weiße Schale ist
mit Wasser gefüllt. Es taucht das Lochblech wenige
Millimeter ein. Das Blech wird von einem Schrittmotor parallel verschoben. Die Sonne beleuchtet die Wasseroberfläche von links. Die Oberfläche reflektiert das Licht auf das Blech. So lassen sich die Wellen auf der Oberfläche sichtbar machen. (FB) |
 |
| Abb. 10-01-02: Auf das Lochblech ist
zur besseren Sichtbarkeit ein weißes Papier geklebt. In der Negativdastellung erscheinen die Wellen als hell/dunkle Streifen (FB) |
 |
| Abb. 10-01-03: anderer Zeitpunkt,
nicht negativ dargestellt. (FB) |
 |
| Abb. 10-01-04: in einer Badewanne
befinden sich etwa 5 cm Wasser. Ein Scheinwerfer
leuchtet die Szene von oben aus. Damit lassen sich
unterschiedliche Krümmungen auf der Wasseroberfläche
gut sichtbar machen. Nachdem ein Holzlöffel
ruckartig nach links beschleunigt wurde, entsteht
dieses Bild. (FB) |
 |
| Abb. 10-01-05: etwas später (FB) |
 |
| Abb. 10-01-06: noch später (FB) |
 |
| Abb. 10-01-07: noch später,
hinter dem Löffel rechts haben sich zwei Wirbel
gebildet. (FB) |
10.2 Messung der Beschleunigung beim Linearantrieb
 |
| Abb. 10-02-01: Mit einem
inkrementalen Taster (Schrittweite 5 um) wird die
Bewegung des Linearantriebs am Umkehrpunkt verfolgt.
(FB) |
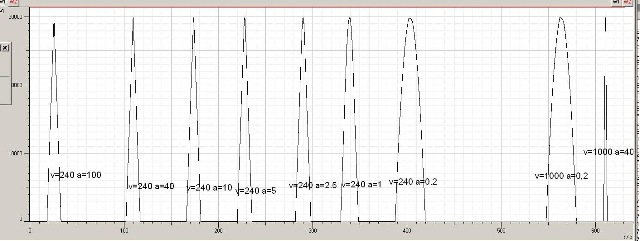 |
| Abb. 10-02-02: Bei der
Geschwindigkeit 240 mm/min (4 mm/s) wurden
unterschiedliche Beschleunigungen bei der
Schrittmotor-Steuerung vorgegeben. Registrierung mit dem inkrementalen Taster. (FB) |
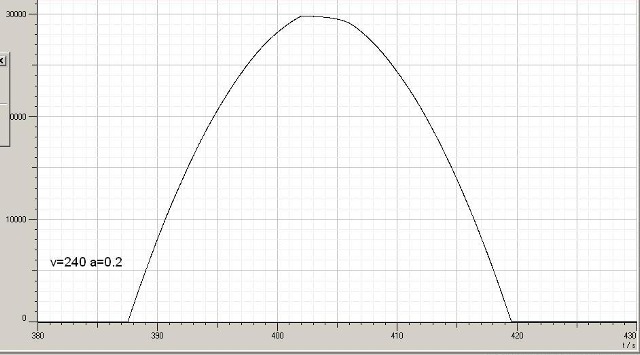 |
| Abb. 10-02-03: Beschleunigung a=
0.2 mm/s² |
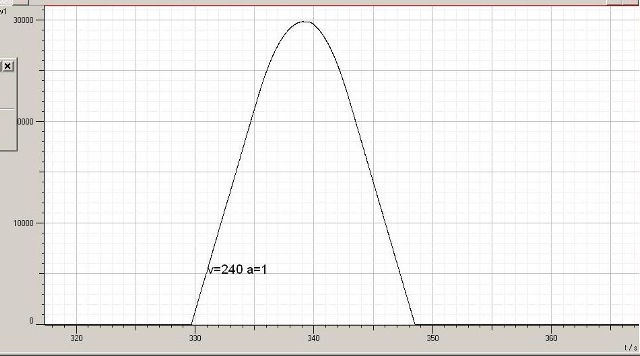 |
| Abb. 10-02-04: Beschleunigung a= 1 mm/s² |
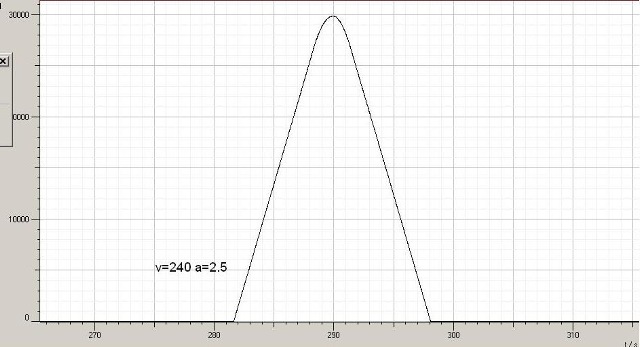 |
| Abb. 10-02-05: Beschleunigung a= 2.5 mm/s² |
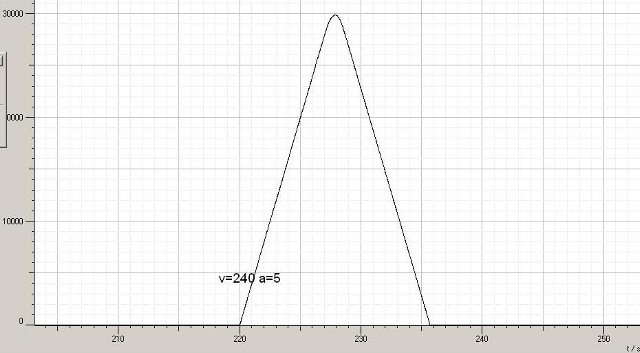 |
| Abb. 10-02-06: Beschleunigung a= 5 mm/s² |
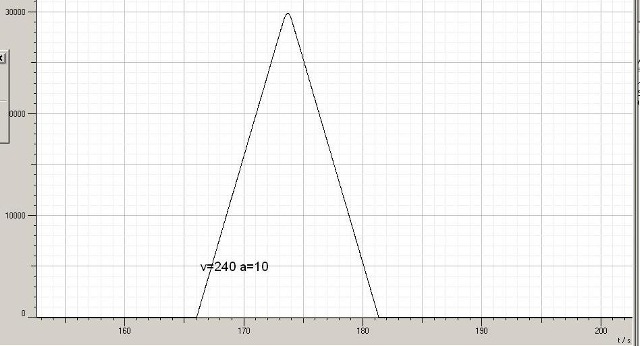 |
| Abb. 10-02-07: Beschleunigung a= 10 mm/s² |
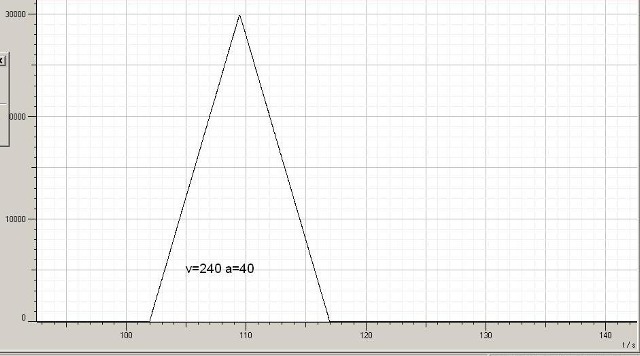 |
| Abb. 10-02-08: Beschleunigung a= 40 mm/s² |
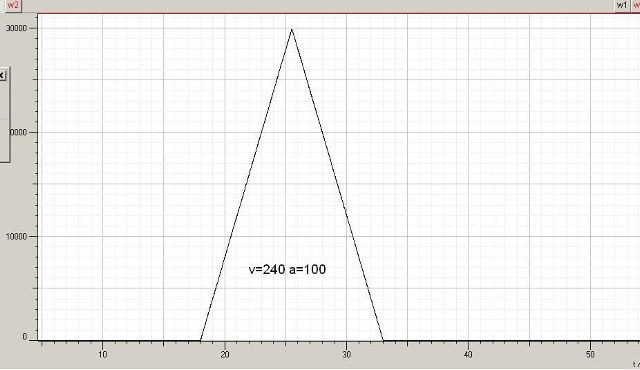 |
| Abb. 10-02-09: Beschleunigung a= 100 mm/s² |
| Beschleunigung auf der Erdoberfläche durch Tagesrotation | |||
| Radius | R | 6 300 000 | m |
| Tag | T | 86400 | s |
| Winkelgeschwindigkeit | ω = 2 pi / T | 7.27221E-05 | 1/s |
| Geschwindigkeit |
v = ω
* R |
458.1 |
m/s |
| Zentrifugalbeschleunigung. | ω² * R | 3.33E-02 | m/s² |
| 33.3 | mm/s² | ||
| Beschleunigung durch Sonnenumlauf im Jahr | |||
| Radius | R | 1.5E+11 | m |
| Tag | T | 31536000 | s |
| Winkelgeschwindigkeit | ω = 2 pi / T | 1.99238E-07 | 1/s |
| Geschwindigkeit |
v= ω
* R |
29885 |
m/s |
| Zentrifugalbeschleunigung. | ω² * R | 5.95E-03 | m/s² |
| 6 |
mm/s2 |
Die Zahlen gelten für den Äquator. Auf der Höhe vom 50. Breitengrad sind es nur 76 %.
übernommen aus bewegte-materie-oszillierend-kurz.htm
| Erdrotation | Sonnenumlauf | Pertinax-Scheibe | Schleifscheiben | |
| R Radius / m | 6300000 | 150000000 | 0.05 | 0.1 |
| T Umlaufzeit, Periodendauer / s | 86400 | 31536000 | 8 | 200 |
| ω = 2 Pi / T Winkelgeschwindigkeit / 1/s |
7.27221E-05 | 1.99238E-07 | 0.7854 | 0.0314 |
| a = ω²*R, Zentrifugal- Beschleunigung / /s² |
0.0333 | 5.9544E-06 | 0.0308 | 9.87E-05 |
| gerundet, Faktor 1000 --> (mm/s²) | 33 mm/s² | 6/1000 mm/s² | 30 mm/s² | 100/1000 mm/s² |
zentrifugal-beschleunigung.xls
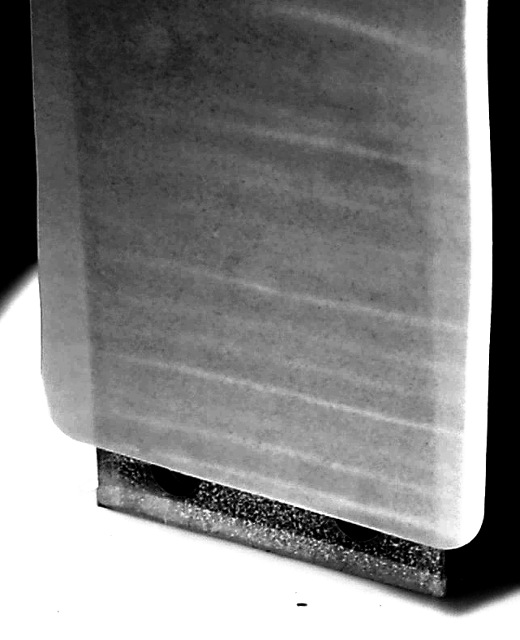
10.3 Kantenstrahlung
 |
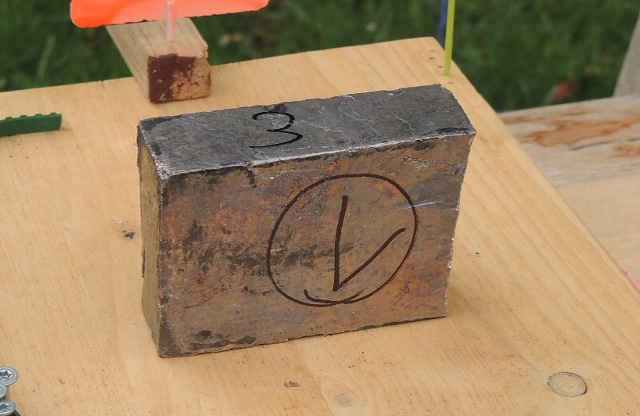
| Abb. 10-03-01: Ein Betonstein (Teil
einer Gehweg-Platte) ist an allen schmalen Kanten
mit einer Diamantscheibe geschnitten worden. Er wird
mit dem Verfahrtisch innerhalb der Helmholtzspule
periodisch bewegt. (FB) |
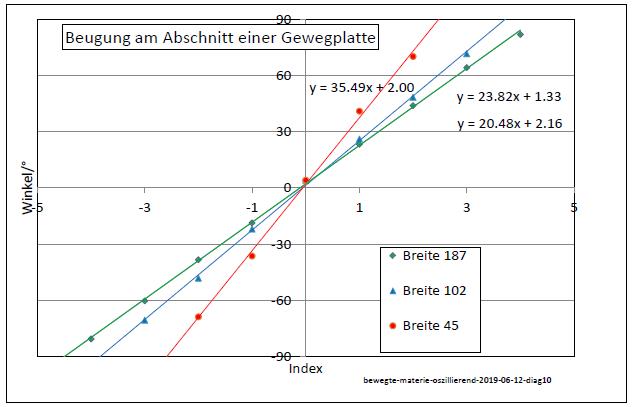 |
Abb. 10-03-01a:Abb. 11-13: Der "Strahl" eines Betonquaders (Abschnitt einer Gewegplatte) besteht aus mehreren Elementen und scheint sich wie bei einem Beugungsbild zu verhalten. |
 |
| Abb. 10-03-02: Eine Glaskugel wird
periodisch bewegt. (FB) |
 |
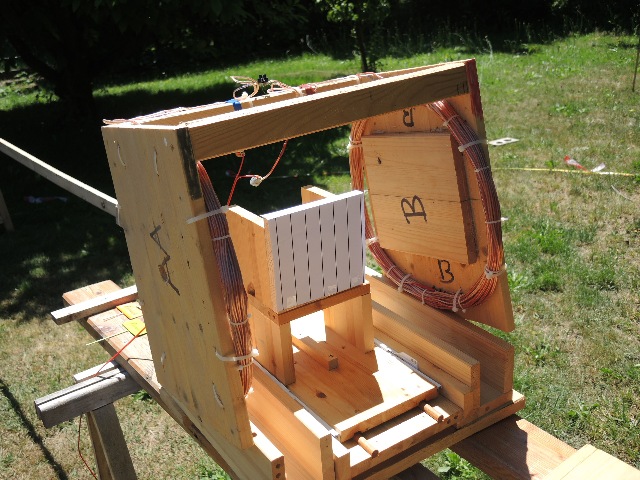
| Abb. 10-03-03: Ein Gitter aus 2 mm
Schweißdraht wird periodisch bewegt. Abstand der
Stäbe: 10 mm Es entsteht ein
"Beugungsmuster". (FB) |
 |
| Abb. 10-03-04: Abstand der Stäbe 15
mm (FB) |
 |
| Abb. 10-03-05: Abstand der Stäbe 20
mm (FB) |
 |
| Abb. 10-03-06: Abstand der Stäbe: 40
mm (FB) |
| abbildung 11??? |
 |
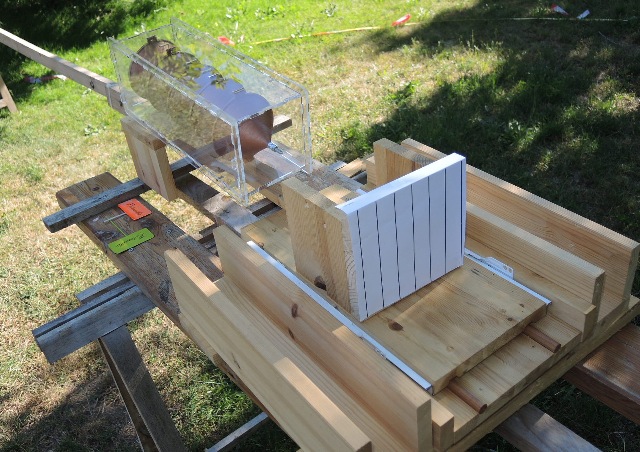
| Abb. 10-03-07: Auf dem weißen Karton
sind parallele Linien mit einem Laserdrucker
ausgedruckt. Abstand der Linien: 15 mm (FB) |
 |
| Abb. 10-03-08: Das gedruckte Gitter
wird innerhalb der Helmholtzspulen bewegt. Der Kupferdraht der Spule ist mit Seide ummantelt. (FB) |
 |
| Abb. 10-03-09: Wenn die Spulen nicht
kurzgeschlossen sind, regen sie das Gitter an. Alternativ liegt daneben ein Abschlußwiderstand mit 100 000 Ohm. Ist dieser angeschlossen gibt es keine Anregung . (FB) |
 |
| Abb. 10-03-10: Am Meßkreis sind die
beobachteten Strukturen mit Marken ausgelegt. (FB) |
 |
| Abb. 10-03-11: Gleiches Experiment
mit Helmholtz-Spulen anderer Bauart. Der Kupferdraht ist mit Kunststoff ummantelt. (FB) |
 |
| Abb. 10-03-12: Experiment mit
Spulen, die durch einen Abschlußwiderstand gedämpft
sind. (FB) |
Beugungsmuster
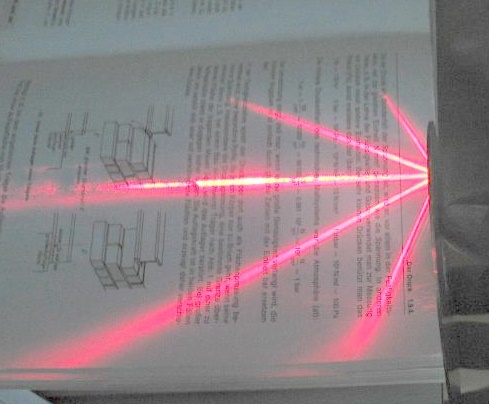 |
Abb. 10-03-13: Beugungsmuster mit
rotem Laserlicht.aus gitterbeugung.htm |
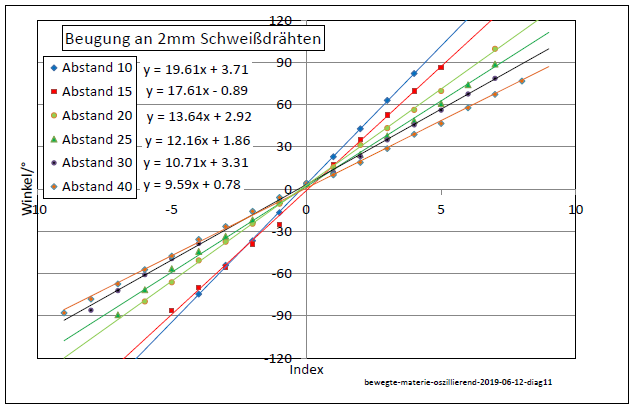
Beugung an 2 mm Schweißdrähten
 |
| Abb. 10-03-11-14: |
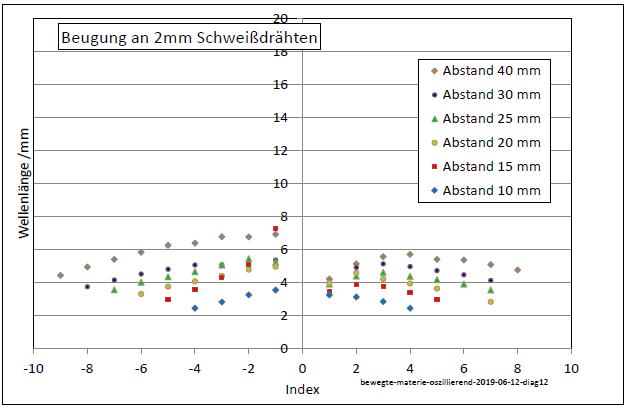 |
| Abb. 10-03-11-15:Wellenlänge liegt im
Bereich von 4 bis 6 mm |
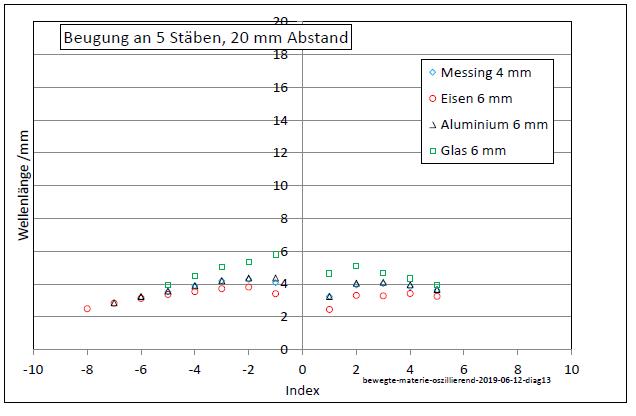 |
| Abb. 10-03-11-16: Die Wellenlänge
liegt im Bereich von 4 mm |
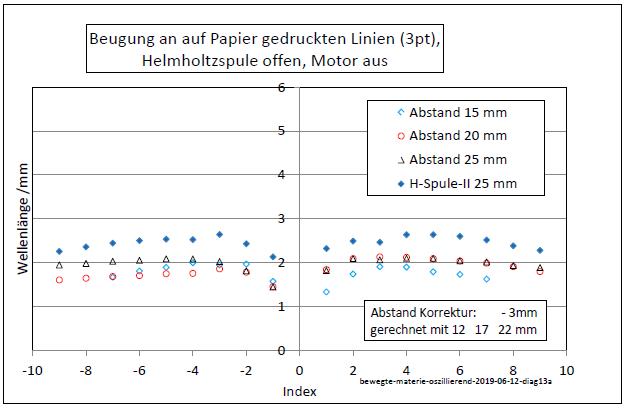 |
| Abb. 10-03-11-17: Beobachtungen an
auf Papier gedruckten Linien ähneln einem
Beugungsmuster Es sind 3 Pt-Linien im Abstand von 15, 20 und 25 mm. Abb. 10-03-07 Das Papier befindet sich zwischen den beiden Helmholtzspulen. Die Spulen sind unbedämpft. Der Schlitten bewegt sich nicht! Wenn die Spulen mit 1 MOhm oder kleiner abgeschlossen sind, gibt es kein Muster. Offensichtlich ist die Spule ein Anreger des Streifenmusters. noch zu klären: Gibt es das Muster auch ohne Spulen aber bei Bewegung? Für die Berechnung der Wellenlänge wurde die Formel n * lambda = d * sin (alpha) verwendet. n Index, d Abstand, alpha Winkel Verringert man den Abstand jeweils um 3 mm, dann liegen die ausgerechneten Wellenlängen für die drei Abstände nahezu übereinander. ( bei schräg einfallende Wellen ist der effektive Abstand kleiner ? siehe Abb. 8b in gitterbeugung.htm ) Der horizontale Verlauf der Punkte im Bild und die Ähnlichkeit der Werte trotz unterschiedliche Abstände spricht für die Gültigkeit der Formel. Ergänzung: Mit einer anderen Helmholtzspule (H-Spule-II) wurden die Messung bei Abstand = 25 mm wiederholt. siehe Abb. 04-02-22 in konische-koerper.htm Die ermittelten Wellenlängen sind bei Anregung durch diese Spule etwas größer. (FB) |
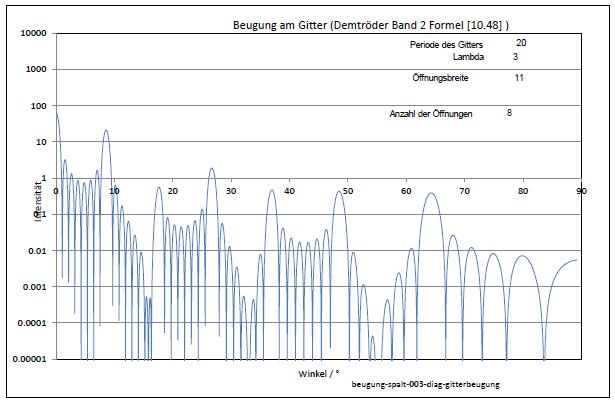 |
| Abb. 10-03-11-18: Beugung an einem
Gitter aus 8 Spalten, Spaltbreite 20 mm,
Öffnungsbreite 11 mm, Wellenlänge 3 mm (gerechnet
nach Formel 10.48 im Dentröder Band 2) Die Intensität ist logarithmisch aufgetragen gegen den Beugungswinkel (FB) |
10.4 Anregung von konischen Körpern und von Sonnenlicht, Beugung am Gitter
 |
| Abb. 10-04-01: Der Contur-Generator
ist auf das Gitter gerichtet. Aus der Spitze des
Generators kommt etwas heraus, das sich wie Wellen
verhält. Denn es läßt sich ein Beugungsmuster
beobachten. konische-koerper-kurz.htm#02-02 (FB) |
 |
| Abb. 10-04-02: Contur-Generator und
auf Papier gedrucktes Gitter. Es entsteht ein
"Beugungsmuster", aus dem sich eine Wellenlänge von
rund 3 mm ermitteln läßt. (FB) |
 |
| Abb. 10-04-03: Konische Körper. Auch
hier entstehen Wellen, die zusammen mit dem Gitter
ein "Beugungsmuster" erzeugen. (FB) |
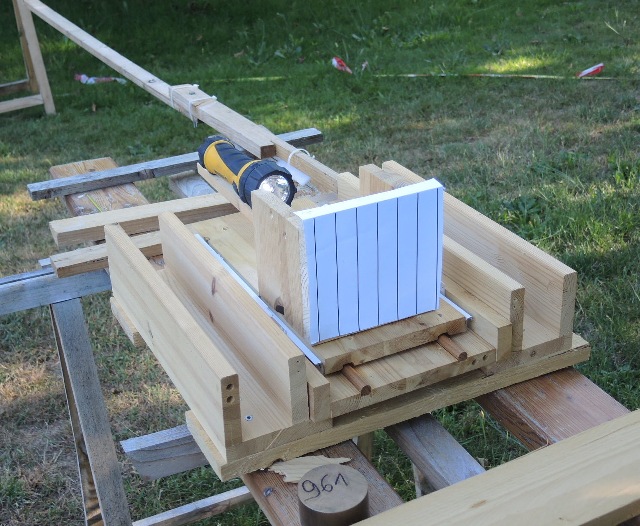 |
| Abb. 10-04-04: LED-Taschenlampe. Auch
hier entsteht ein "Beugungsmuster". Gitter mit dünnen schwarzen Strichen und breiten weißen Zwischenräumen. (FB) |
 |
| Abb. 10-04-05: LED-Taschenlampe und
Gitter mit breiten schwarzen Strichen. Breite (hell:dunkel) wie etwa (1:1). Durchstrahlung (FB) |
 |
| Abb. 10-04-06: gespiegeltes
Sonnenlicht fällt auf das Streifengitter. Es entsteht in Reflexion ein Beugungsmuster. (FB) |
 |
| Abb. 10-04-07: Streifengitter und
gespiegeltes Sonnenlicht. Das direkte Sonnenlicht
wird durch einen Karton auf dem Kistenstapel
abgeschattet. (FB) |
 |
| Abb. 10-04-08:Streifengitter und
gespiegeltes Sonnenlicht. Es entsteht ein
"Beugungsmuster" in Reflexion. (FB) |
 |
| Abb. 10-04-09: verschiedene Gitter
mit unterschiedlicher Gitterkonstante erzeugen
unterschiedliche Beugungsmuster. (FB) |
 |
| Abb. 10-04-10: Gespiegeltes
Sonnenlicht und Streifengitter, es gibt ein
"Beugungsmuster" vor dem Gitter. Das reflektierte
Licht zeigt in Richtung Süden. (FB) |
 |
| Abb. 10-04-11: Gespiegeltes Sonnenlicht und Streifengitter, das Beugungsmuster entsteht vor dem Gitter (in Reflexion) (FB) |
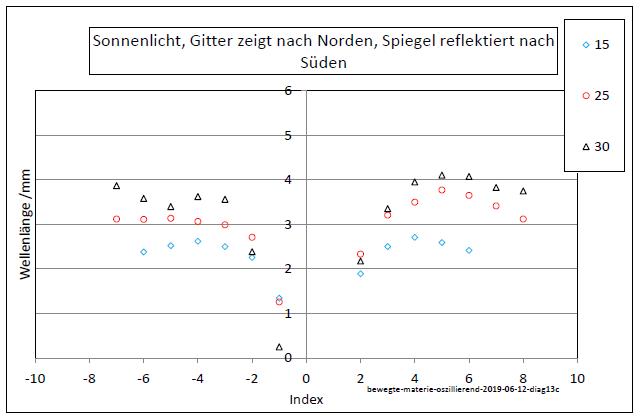 |
| Abb. 10-04-12: "Beugungsmuster" bei
drei Gittern mit unterschiedlichem Linienabstand: 15 mm, 25 m und 30 mm. Unter der Annahme, daß es sich um Beugung von Wellen handelt, ergibt sich mit der Gleichung n * λ = d * sin(α) eine Wellenlänge λ zwischen 2 und 4 mm. d: Periode des Gitter, n: Beugungsordnung, α: Beugungswinkel (FB) |
10.5 Batterien und Streifengitter
 |
| Abb. 10-05-01: Batterien in
ausgeschalteter Taschenlampe. Die davon ausgehende
"Strahlung" erzeugt beim Auftreffen auf das
Streifengitter dahinter und davor ein
"Beugungsmuster". (FB) |
 |
| Abb. 10-05-02: Batterien in Reihe,
Pluspol nach rechts. Die aus dem Pluspol
herauskommende "Strahlung" erzeugt hinter und vor
dem Streifengitter ein "Beugungsmuster". (FB) |
 |
| Abb. 10-05-03: Batterien
entgegengesetzt, Pluspole außen. Es gibt kaum
spürbare "Strahlung" und daher auch kein
"Beugungsmuster" vor und hinter dem Streifengitter.
(FB) |
 |
| Abb. 10-05-04: Batterien in
Reihe, "Beugungsmuster" vor und hinter dem
Streifengitter ist schwächer als bei umgekehrter
Polung. (FB) |
10.6 Gespiegeltes Sonnenlicht
 |
| Abb. 10-06-01: Zaunpfahlkappe mit
Hohlkugel, aus verzinktem Eisenblech. Im Gegensatz
zu den pyramidenförmigen Zaunpfahlkappen gibt es
hier keinen "Strahl", sondern eine in alle Richtunen
reichende "Strahlung". (FB) |
 |
| Abb. 10-06-02: Hohlkugel wird mit
gespiegeltem Sonnenlicht angeregt. Dadurch sind die von der Kugel ausgehenden Strukturen intensiver.(FB) |
 |
| Abb. 10-06-03: Contur-Generator wird
mit gespiegeltem Sonnenlicht angeregt. (FB) |
 |
| Abb. 10-06-04: Contur-Generator wird
mit gespiegeltem Sonnenlicht angeregt. Dadurch werden die aus der Spitze des Generators herauskommenden Strukturen intensiver. (FB) |
 |
| Abb. 10-06-05: Glasspiegel (Haushalt)
reflektiert Sonnenlicht auf die Hauswand. (FB) |
 |
| Abb. 10-06-06: Glasspiegel und heller
Fleck auf der Hauswand. Links und rechts vom
Lichtbündel gibt es ausgespaltene Strukturen
(Beugungsmuster). Man findet sich auch noch hinter
der Hauswand. (FB) |
 |
| Abb. 10-06-07: Oberflächenspiegel für
optische Geräte (FB) |
 |
| Abb. 10-06-08: gespiegeltes
Sonnenlicht auf der Hauswand. Im Inneren des Hauses lassen sich links und rechts von der Strahlachse aufgespaltene Strukturen beobachten (Beugungsmuster). (FB) |
11 Auswertung bis Juni 2019
Bewegte Zylinder
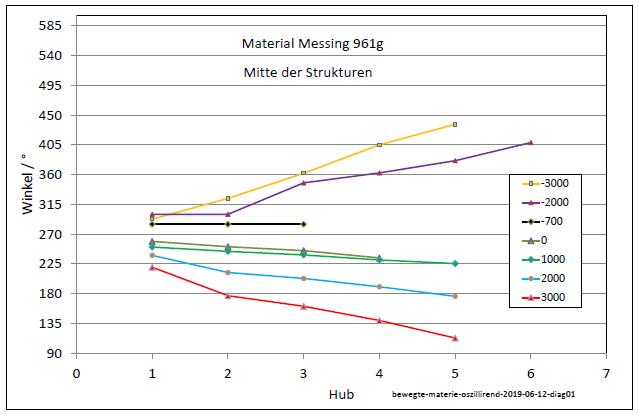 |
| Abb. 11-01: Messingzylinder 961g
oszlliert. Die Struktur hat einen Öffnungswinkel von
mehr als 90°. Nach jedem Hub wurde die Mitte der Struktur auf dem Rasen markiert. Die Mitte der Öffnung wandert vom Startwinkel weg, entweder CCW oder CW. Dabei bestimmt der Strom (angegeben in pA) in den Helmholtz-Spulen Vorzeichen und Stärke der Änderung. Bei positivem Strom ist die Änderung CW, bei negativem überwiegend CCW. Bei -700 pA ändert sich nichts. Für jeden Hub wurden linke und rechte Kante der Struktur markiert und anschließend mit Hilfe von einem Kompass der zugehörige Winkel am Meßkreis bestimmt. Als Mitte wurde der Mittelwert von beiden Werten genommen. (FB) |
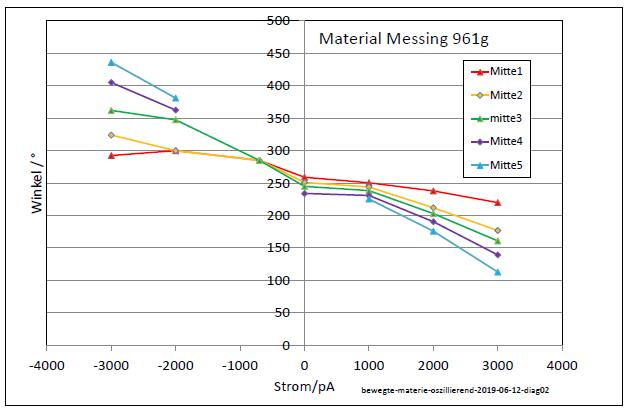 |
| Abb. 11-02: Daten wie in vorheriger
Abbildung, Messingzylinder 961g. Es ist jeweils die Richtung der Mitte des Öffnungswinkel dargestellt nach jedem Hub für unterschiedliche Spulenströme. Mitte1 nach Hub1, Mitte2 nach Hub2 usw. Je größer der Strom ist, umso mehr wandert die Richtung vom Startwinkel weg. (FB) |
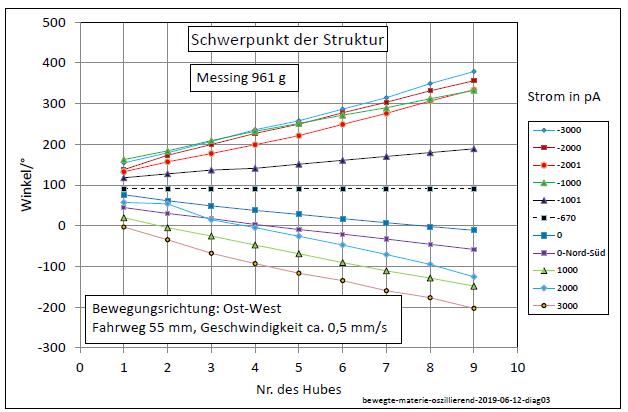 |
| Abb. 11-03: Wiederholung von Abb. 11-01 mit besseren Geräten. Messingzylinder 961g Ausrichtung der Bewegung West-Ost. Hin- und Herbewegung mit 0,3 U/Minute, (etwa 90° an der Kurbel) Fahrweg des Pleuels und der Probe ca. 55 mm. Die Richtung der Mitte des Öffnungswinkels wandert bei jedem Hub entweder CCW oder CW weg vom Ausgangswinkel. Über einen extrem kleinen Gleichstrom in den Helmholtz-Spulen lassen sich Stärke und Vorzeichung der Winkeländerung beeinflussen. Strom in pA, Strom mit positivem Vorzeichen bewirkt eine Drehung CW, mit negativem CCW. Fließt kein Strom gibt es eine schwache Drehung CCW. Mit -670 pA läßt sich die "natürliche" Rotation kompensieren. Dann bleibt die Struktur bei jedem Hub ortsfest. Im Vergleich zum Erdmagnetfeld von 40 µT ist das durch die Spule bei 3000 pA zusätzlich erzeugte Feld etwa um den Faktor von 400 Millionen schwächer! (FB) |
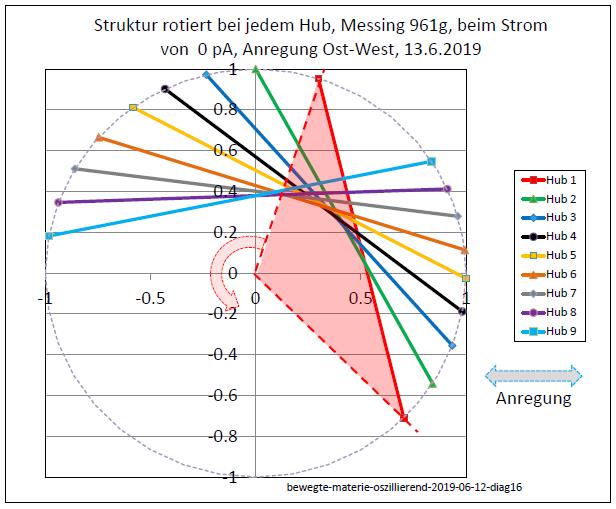 |
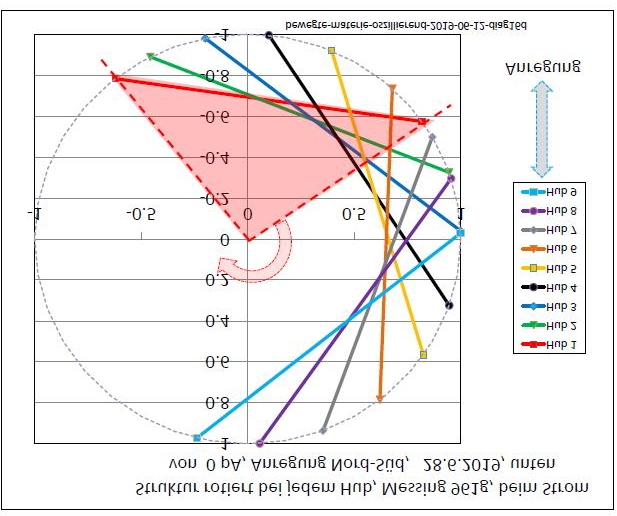
| Abb. 11-04: Anregung in Ost-West-Richtung. Die beobachtete Struktur hat einen Öffnungswinkel von mehr als 90° (rotes Dreieck). Gezeichnet ist jeweils die zugehörige Sehne am Kreis. Bei jedem Hub verändert sie ihre Richtung. Das Dreieck zeigt schematisch die Situation nach dem ersten Hub an. Situation bei Strom von 0 pA durch die Helmholtz-Spule. Die Rotation ist CW. (FB) |
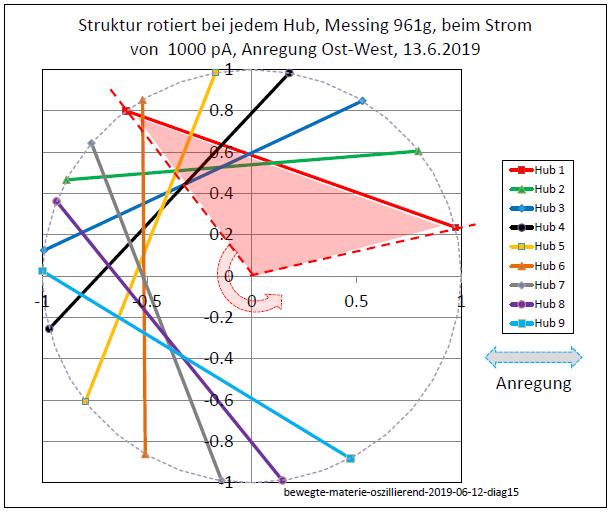 |
| Abb. 11-05: Anregung in Ost-West-Richtung. Bei 1000 pA Strom bleibt die Rotation CW, aber die Schritte pro Hub sind größer geworden. (FB) |
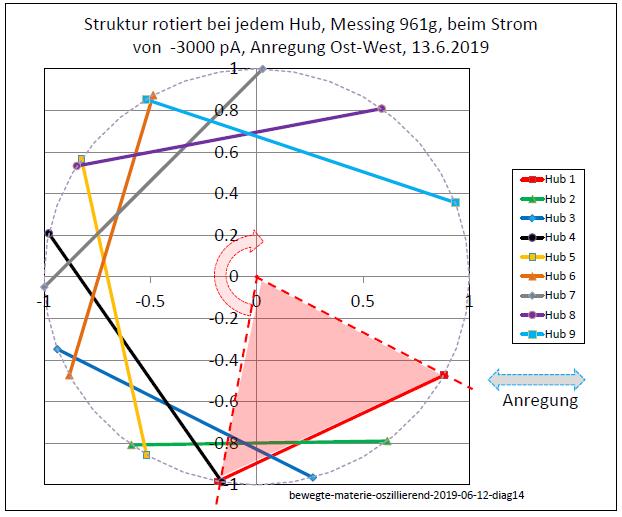 |
| Abb. 11-06: Anregung in Ost-West-Richtung. Bei -3000 pA ist die Rotation in umgekehrter Richtung, CCW. Die Schrittweite hat stark zugenommen. Je größer der Spulenstrom umso stärker ist die Winkeländerung pro Hub. Das Vorzeichen des Stromes gibt die Richtung für die Winkeländerung vor. (FB) |
 |
| Abb. 11-06a: Anregung geändert, nun
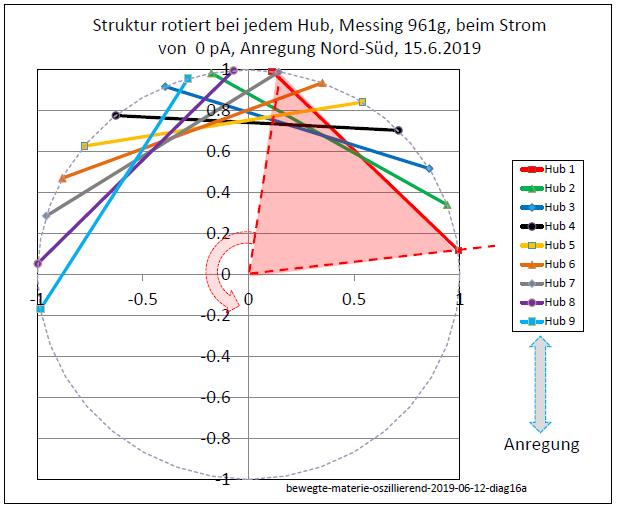
in Nord-Süd-Richtung, Strom 0 pA, auch hier ist die Rotation CW, zum Vergleich mit Abb. 11-04 (FB) |
 |
| Abb. 11-06b: Anregung in Nord-Süd-Richtung,
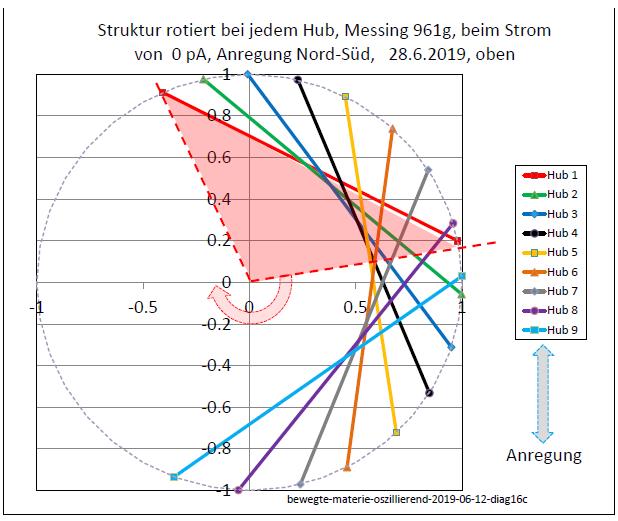
Wiederholung der Messung am 28.6.2019 Strom 0 pA, zum Vergleich mit Abb. 11-04 , auch hier ist die Rotation CW, Struktur oberhalb des "Äquators", der Halbebene durch den Probekörper (FB) |
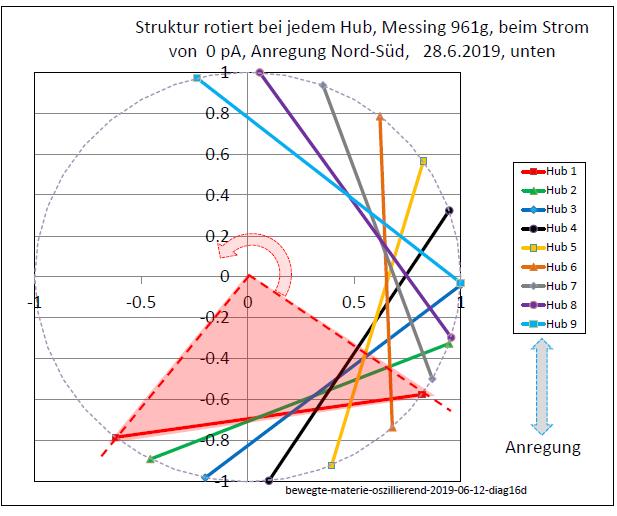 |
| Abb. 11-06c: Anregung in Nord-Süd-Richtung,
Wiederholung der Messung am 28.6.2019 Strom 0 pA. Struktur unterhalb des "Äquators". Sie verhält sich spiegelbildlich zu der Struktur oberhalb davon. Die Rotation ist nun CCW zum Vergleich mit Abb. 11-06b (FB) |
 |
| Abb. 11-06d: Das gleiche Diagramm
aber in gespiegelter Form. Damit sieht es sehr
ähnlich aus wie die Darstellung in Abb. 11-06b. Offensichtlich verläuft die Rotation oberhalb des Äquators spiegelbildlich zu der Rotation unterhalb davon. (FB) |
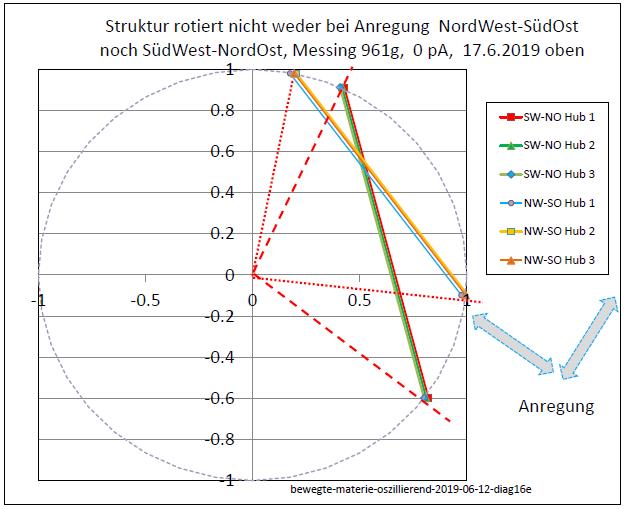 |
| Abb. 11-06e: Die Struktur rotiert
nicht, wenn die Bewegung in einer Zwischenhimmelsrichtung
erfolgt: NordWest-SüdOst oder SüdWest-
NordOst (FB) |
|
Abb. 11-06f: Die Himmelsrichtung
der Bewegung hat Einfluß auf die Richtung der
Rotation der Strukturen.
|
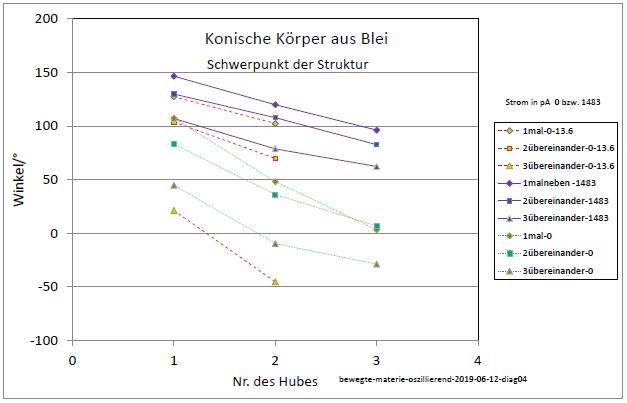 |
| Abb. 11-07: Konische Körper aus Blei,
Fahrbedingungen wie bei Messing 961g. Die Körper haben eine pyramidenförmige Spitze. Stellt man mehrere Körper übereinander, dann vergrößert sich dadurch die Winkelzunahme bei jedem Hub. Stellt man sie nebeneinander, dann bleibt die Winkelzunahme unverändert. Offensichtlich kommt aus den Pyramidenspitzen "etwas" heraus, daß den Effekt beeinflußt. (FB) |
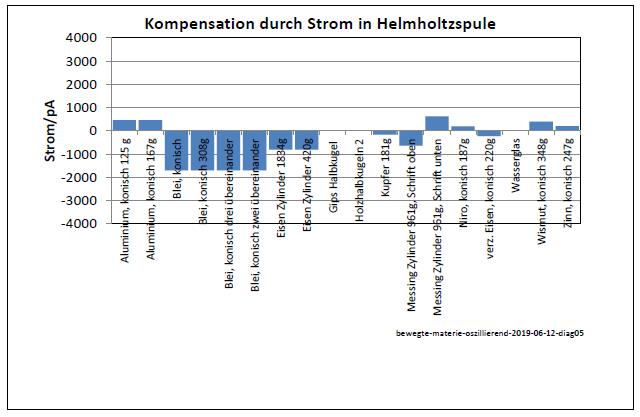 |
| Abb. 11-08: Vorzeichen und Stärke der
Richtungsänderung bei jedem Hub läßt sich durch
einen Strom in der Helmholz-Spule beeinflussen.
Viele der Proben hatten ohne Strom schon eine
ständige Richtungsänderung. Mit Hilfe eines
Gleichstroms in der Spule ließ sich diese so
kompensieren, daß die Struktur sich nicht mehr
änderte. Amorphes Material wie z.B. Gips benötigt keine Kompensation. Bei den meisten anderen läßt sich die Rotation durch Kompensation abstellen. Je nach Vorzeichen der Rotation benötigt man dafür Strom mit unterschiedlichem Vorzeichen und Stärke. Der Messingzylinder 961g ist aus gezogenem Material, d.h. er hat durch die Verformung eine innere Richtung bekommen. Zeigt nun die eine Seite des Zylinders nach oben, dann benötigt man negativen Strom, bei der anderen Seite positiven Strom. Konische Körper Blei und Aluminium verhalten sich komplementär. Daten für die Bewegungsrichtung West-Ost. In Richtung Süd-Nord sind die Verhältnisse umgekehrt. In den beiden Zwischenhimmelsrichtungen gibt es keine "natürliche" Rotation bei allen Materialien. (FB) |
 |
| Abb. 11-09: Länge der Struktur in Nord-Süd-Richtung.
Bewegung (Hub) in Nord-Süd-Richtung. Der Anfang der
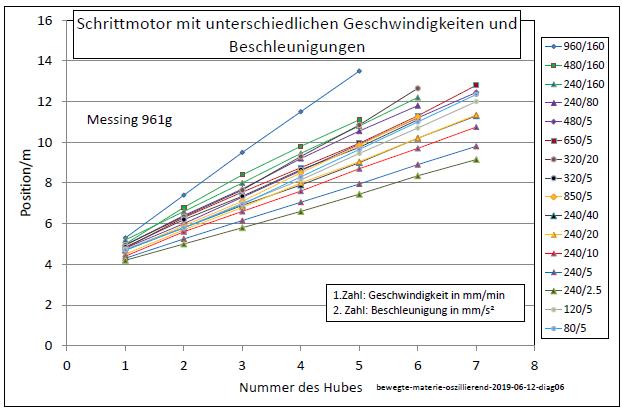
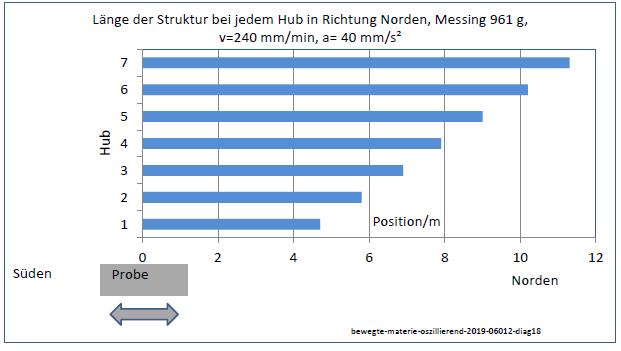
Längenachse ist dort, wo der Körper bewegt wird. Antrieb mit Schrittmotor, Geschwindigkeit und Beschleunigung waren einstellbar. In Richtung des Hubes (Süd-Nord) wächst die Struktur in Achsenrichtung bei jedem Hub um einen bestimmten Betrag an. Aufgetragen ist die jeweilige Endposition beim Hub in Richtung Norden (FB) |
 |
| Abb. 11-09a: Daten aus vorheriger
Abbildung. Der Messingzylinder bewegt sich Süd-Nord.
Die beobachtete Struktur liegt im Norden. Sie wächst
bei jedem Hub in Richtung Norden an. |
 |
| Abb. 11-09b: Daten aus Abb. 09.
Bei Süd-Nord-Anregung nimmt die Länge der Struktur
in Richtung Norden zu und zwar am Anfang eines jedem
Hubes in Richtung Norden. Dagegen ist bei der
umgekehrten Bewegung (nach Süden) die Struktur nicht
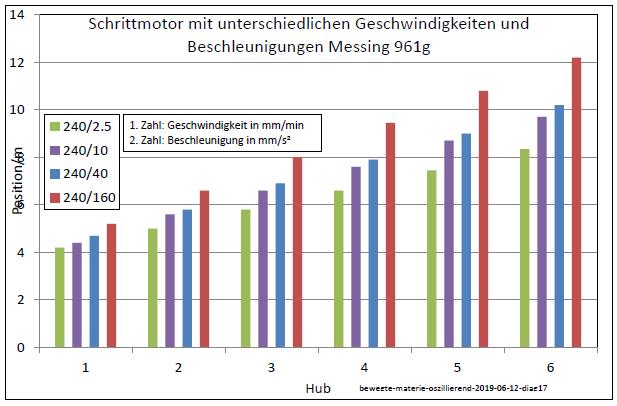
oder nur schwach ausgeprägt. Beschleunigungen 2,5; 10; 40; und 160 mm/s² Offensichtlich hat die Höhe der Beschleunigung einen entscheidenden Einfluß: Je größer die Beschleunigung umso größer ist die Zunahme pro Hub. (FB) |
 |
| Abb. 11-10: Anwachsen der Struktur in
Bewegungsrichtung (Süd-Nord), Position des äußeren
Randes bei Geschwindigkeit von 240 mm/Minute
und unterschiedlichen Beschleunigungen von 2,5
mm/² bis 160 mm/s². Die Grafik zeigt, daß das
Anwachsen mit der Beschleunigung zunimmt. (FB)
|
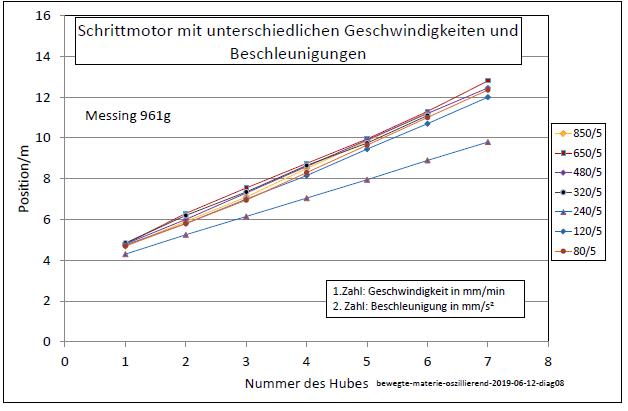 |
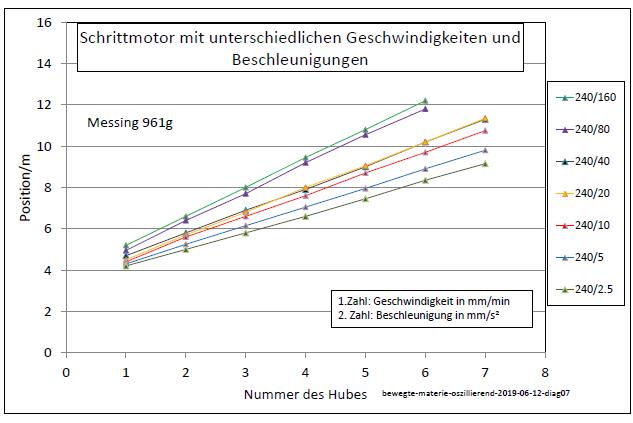
| Abb. 11-11: Anwachsen der Struktur in
Bewegungsrichtung (Süd-Nord), Position des äußeren
Randes bei Beschleunigung 5 mm/s² und
unterschiedlichen Geschwindigkeiten. Bis auf die Kurve 240/5 sieht es so aus, als hätte die Geschwindigkeit keinen Einfluß auf das Anwachsen. (bei 240/5 sind möglicherweise andere Bedingungen oder Meßfehler) (FB) |
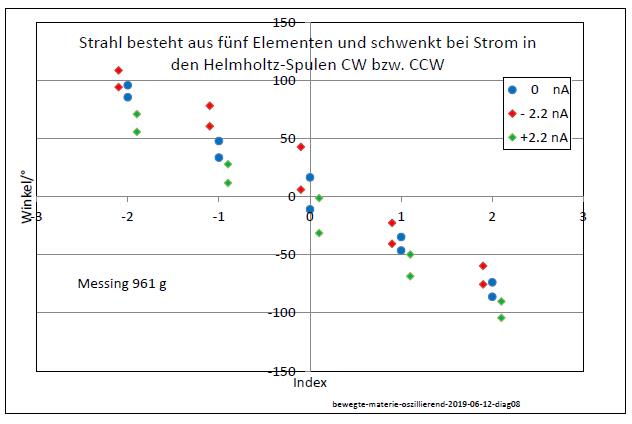 |
| Abb. 11-12: Bei Messing 961 besteht
der "Strahl" in Bewegungsrichtung (Süd-Nord)
offensichtlich aus mehreren Elementen (hier sind es
fünf: mittig und jeweils zwei seitlich), die sich
symmetrisch um die Mittelachse verteilen. Sie sind indiziert mit -2, -1, 0, 1, 2 (Index bei Stromfluß jeweils um plus/minus 0.1 seitlich verschoben zur besseren Unterscheidung) Dieses Bündel läßt sich als Ganzes mit einem Strom in den Helmholtzspulen von z.B. +/-2.2 nA zu beiden Seiten schwenken. (FB) |
Literatur: b-literatur.htm
 |
www.biosensor-physik.de | (c)
05.06.2018 - 12.02.2025 F.Balck |
© BioSensor-Physik 2025 · Impressum